Difference between revisions of "NanoPC-T2"
(→制作一张带运行系统的SD卡) |
(updated by API) |
||
| (257 intermediate revisions by 6 users not shown) | |||
| Line 2: | Line 2: | ||
==Introduction== | ==Introduction== | ||
| − | [[File:NanoPC-T2- | + | [[File:NanoPC-T2-1B.jpg|thumb|Overview]] |
| − | [[File:NanoPC-T2- | + | [[File:NanoPC-T2-A1.jpg|thumb|Front]] |
| − | [[File:NanoPC-T2- | + | [[File:NanoPC-T2-B1.jpg|thumb|Back]] |
| − | * The NanoPC-T2 quad core Cortex A9 single board computer is designed and developed by FriendlyARM for professional and enterprise users. It uses Samsung Quad Core Cortex-A9 S5P4418 SoC with dynamic frequency scaling up to 1.4GHz. Compared to FriendlyARM's existing 4418 based boards the NanoPC-T2 has 8G eMMC onboard, audio jack and video input/output interfaces. Compared to its predecessor the NanoPC-T1 the NanoPC-T2 has built-in WiFi, Bluetooth and Gbps Ethernet port. In addition the NanoPC-T2 has power management which the NanoPC-T1 doesn't support. To avoid overheat issues the NanoPC-T2 has a heat sink with mounting | + | * The NanoPC-T2 quad core Cortex A9 single board computer is designed and developed by FriendlyARM for professional and enterprise users. It uses the Samsung Quad Core Cortex-A9 S5P4418 SoC with dynamic frequency scaling up to 1.4GHz. Compared to FriendlyARM's existing 4418 based boards the NanoPC-T2 has 8G eMMC onboard, audio jack and video input/output interfaces. Compared to its predecessor the NanoPC-T1 the NanoPC-T2 has built-in WiFi, Bluetooth and Gbps Ethernet port. In addition the NanoPC-T2 has power management which the NanoPC-T1 doesn't support. To avoid overheat issues the NanoPC-T2 has a heat sink with mounting posts. |
| − | * The NanoPC-T2 combines all the ports and interfaces the existing FriendlyARM 4418 boards have. Currently it has the most interfaces and ports among all existing ARM boards of this size. Its rich video interfaces and support for HDMI 1080P | + | * The NanoPC-T2 combines all the ports and interfaces the existing FriendlyARM 4418 boards have. Currently it has the most interfaces and ports among all existing ARM boards of this size. Its rich video interfaces and support for HDMI 1080P enable it to work with not only popular display devices but also various FriendlyARM LCDs (both resistive touch and capacitive touch). |
* The NanoPC-T2 is FriendlyARM's most complete solution based on Samsung 4418 for both commercial and industrial applications. | * The NanoPC-T2 is FriendlyARM's most complete solution based on Samsung 4418 for both commercial and industrial applications. | ||
| − | == | + | ==Hardware Spec== |
* SoC: Samsung S5P4418 Quad Core Cortex-A9 with dynamic frequency scaling up to 1.4G Hz | * SoC: Samsung S5P4418 Quad Core Cortex-A9 with dynamic frequency scaling up to 1.4G Hz | ||
| − | * Power Management | + | * PMU Power Management: Implemented by an MCU, support solftware power-off, and RTC alarm power-on functions |
* System Memory: 1GB 32bit DDR3 RAM | * System Memory: 1GB 32bit DDR3 RAM | ||
* eMMC: 8GB | * eMMC: 8GB | ||
| − | * Storage: 1 x SD Card | + | * Storage: 1 x SD Card Slot |
| − | * Ethernet: Gbps Ethernet Port (RTL8211E) | + | * Ethernet: Gbps Ethernet Port (RTL8211E) with unique MAC |
* WiFi: 802.11b/g/n | * WiFi: 802.11b/g/n | ||
* Bluetooth: 4.0 dual mode | * Bluetooth: 4.0 dual mode | ||
| Line 32: | Line 32: | ||
* LED: 1 x power LED , 2 x GPIO LED | * LED: 1 x power LED , 2 x GPIO LED | ||
* User Key: 1 x K1 (power), 1 x Reset | * User Key: 1 x K1 (power), 1 x Reset | ||
| + | * Other Resource: 1 x onboard thermistor | ||
* RTC Battery: RTC Seat Pins | * RTC Battery: RTC Seat Pins | ||
* Power: DC 5V/2A | * Power: DC 5V/2A | ||
* Heat Sink: 1 x Heat Sink with mounting holes | * Heat Sink: 1 x Heat Sink with mounting holes | ||
| − | * PCB: Six Layer | + | * PCB: Six Layer, ENIG |
* PCB Dimension: 100 mm x 60 mm | * PCB Dimension: 100 mm x 60 mm | ||
| − | * OS/Software: u-boot, Android5.1 | + | * Working Temperature: -40℃ to 70℃ |
| + | * OS/Software: u-boot, Android 4.4, Android5.1 and Debian8 | ||
| + | |||
| + | ==Software Features== | ||
| + | ===UbuntuCore=== | ||
| + | <!--- | ||
| + | * mainline kernel: Linux-4.11.2 | ||
| + | * rpi-monitor: check system status and information | ||
| + | ---> | ||
| + | * npi-config: system configuration utility for setting passwords, language, timezone, hostname, SSH and auto-login,and enabling/disabling i2c, spi, serial and PWM | ||
| + | <!--- | ||
| + | * software utility: wiringNP to access GPIO pins | ||
| + | * software utility: RPi.GPIO_NP to access GPIO pins | ||
| + | ---> | ||
| + | * networkmanager: manage network | ||
| + | * system log output from serial port | ||
| + | <!--- | ||
| + | * nano editor | ||
| + | ---> | ||
| + | * welcome window with basic system information and status | ||
| + | * auto-login with user account "pi" with access to npi-config | ||
| + | * UART2 enabled | ||
| + | * supports CAM500B | ||
| + | <!--- | ||
| + | * sudoers include "fa" | ||
| + | * on first system boot file system will be automatically extended. | ||
| + | * supports file system auto check and repair on system boot. | ||
| + | * supports FriendlyElec's [http://wiki.friendlyelec.com/wiki/index.php/NanoHat_PCM5102A NanoHat-PCM5102A] | ||
| + | * supports USB WiFi module: refer to [[#Connect USB WiFi to NEO]] | ||
| + | * supports audio recording and playing with 3.5mm audio jack | ||
| + | * supports USB Host and 100M Ethernet | ||
| + | * supports FriendlyElec BakeBit modules | ||
| + | * supports dynamic frequency scaling and voltage regulation | ||
| + | * relieves overheat compared to kernel Linux-3.4 | ||
| + | * fixed MAC address | ||
| + | |||
| + | ===Ubuntu OLED=== | ||
| + | * mainline kernel: Linux-4.11.2 | ||
| + | * supports FriendlyElec's OLED module | ||
| + | ---> | ||
| + | |||
| + | ===Debian=== | ||
| + | * supports CAM500B | ||
| + | |||
| + | <!--- | ||
| + | ===Debian for NAS Dock=== | ||
| + | * mainline kernel: Linux-4.11.2 | ||
| + | * supports FriendlyElec's NAS Dock | ||
| + | * optimized OpenMediaVault configuration options | ||
| + | * allocated swap section | ||
| + | ---> | ||
| + | ===Android=== | ||
| + | * supports setting up static IP | ||
| + | * supports accessing hardware with FriendlyElec's libfriendlyarm-things.so | ||
| + | * integrated iTest utility for testing hardware | ||
==Diagram, Layout and Dimension== | ==Diagram, Layout and Dimension== | ||
===Layout=== | ===Layout=== | ||
| − | [[File:NanoPC-T2 | + | [[File:NanoPC-T2-IF.png |thumb|600px|NanoPC-T2 Layout]] |
* '''30Pin GPIO Pin Spec''' | * '''30Pin GPIO Pin Spec''' | ||
| Line 79: | Line 134: | ||
|} | |} | ||
| − | * ''' | + | * '''LVDS ''' |
::{| class="wikitable" | ::{| class="wikitable" | ||
|- | |- | ||
| − | |Pin# || Name | + | |Pin# || Name |
|- | |- | ||
| − | |1 | + | |1 || VDD_5V |
|- | |- | ||
| − | |3 | + | |2 || VDD_5V |
| + | |- | ||
| + | |3 || VDD_5V | ||
| + | |- | ||
| + | |4 || LVDS_Y0M | ||
|- | |- | ||
| − | |5 || | + | |5 || LVDS_Y0P |
| + | |- | ||
| + | |6 || DGND | ||
| + | |- | ||
| + | |7 || LVDS_Y1M | ||
| + | |- | ||
| + | |8 || LVDS_Y1P | ||
| + | |- | ||
| + | |9 || DGND | ||
| + | |- | ||
| + | |10 || LVDS_Y2M | ||
| + | |- | ||
| + | |11 || LVDS_Y2P | ||
| + | |- | ||
| + | |12 || DGND | ||
| + | |- | ||
| + | |13 || LVDS_CLKM | ||
| + | |- | ||
| + | |14 || LVDS_CLKP | ||
|- | |- | ||
| − | | | + | |15 || DGND |
|- | |- | ||
| − | | | + | |16 || LVDS_Y3M |
|- | |- | ||
| − | | | + | |17 || LVDS_Y3P |
|- | |- | ||
| − | | | + | |18 || DGND |
|- | |- | ||
| − | | | + | |19 || GPIOB18 |
|- | |- | ||
| − | | | + | |20 || DGND |
|- | |- | ||
| − | | | + | |21 || I2C2_SCL |
| + | |- | ||
| + | |22 || I2C2_SDA | ||
| + | |- | ||
| + | |23 || GPIOC16 | ||
| + | |- | ||
| + | |24 || DGND | ||
|} | |} | ||
| Line 122: | Line 205: | ||
|6 || GPIOB16 | |6 || GPIOB16 | ||
|- | |- | ||
| − | |8 | + | |8 || GPIOC13/PWM1 |
| + | |- | ||
| + | |10 || NC | ||
|- | |- | ||
|11 || VSYNC | |11 || VSYNC | ||
| Line 162: | Line 247: | ||
|36 || LCDCLK || LCD clock, Pixel frequency | |36 || LCDCLK || LCD clock, Pixel frequency | ||
|- | |- | ||
| − | |41 || I2C2_SCL || I2C2 clock signal, for capacitive touch | + | |41 || I2C2_SCL || I2C2 clock signal, for capacitive touch data transmission |
|- | |- | ||
| − | |42 || I2C2_SDA || I2C2 data signal, for capacitive touch | + | |42 || I2C2_SDA || I2C2 data signal, for capacitive touch data transmission |
|- | |- | ||
|43 || GPIOC16 || interrupt pin for capacitive touch, used with I2C2 | |43 || GPIOC16 || interrupt pin for capacitive touch, used with I2C2 | ||
| Line 186: | Line 271: | ||
|7 || DGND | |7 || DGND | ||
|- | |- | ||
| − | |8 || | + | |8 || GPIOC16 |
|- | |- | ||
|9 || DGND | |9 || DGND | ||
| Line 256: | Line 341: | ||
|11 || DGND | |11 || DGND | ||
|- | |- | ||
| − | |12 || | + | |12 || GPIOB23 |
|- | |- | ||
|13 || GPIOC2 | |13 || GPIOC2 | ||
|- | |- | ||
| − | |14 | + | |14 || GPIOC13/PWM1 |
| + | |- | ||
| + | | 15 || DGND | ||
|- | |- | ||
|16 || MIPICSI_DN3 | |16 || MIPICSI_DN3 | ||
| Line 294: | Line 381: | ||
:'''Note:''' | :'''Note:''' | ||
::#SYS_3.3V: 3.3V power output | ::#SYS_3.3V: 3.3V power output | ||
| − | ::#VDD_5V: 5V power | + | ::#VDD_5V: 5V power output |
| − | ::#For more details | + | ::#For more details refer to the document: [http://wiki.friendlyelec.com/wiki/images/b/b4/NanoPC-T2-T3-1711-Schematic.pdf NanoPC-T2-T3-Schematic.pdf] |
===Board Dimension=== | ===Board Dimension=== | ||
| − | [[File:NanoPC- | + | [[File:NanoPC-T2-T3.png|frameless|800px|NanoPC-T2 Dimensions]] |
| − | ::For more details | + | ::For more details refer to the document: [http://wiki.friendlyelec.com/wiki/images/8/88/NanoPC-T2-T3_1711_Draw_dxf.zip NanoPC-T2-T3_1711_Draw_dxf.zip] |
| + | |||
| + | *'''Power Jack''' | ||
| + | ::*DC 4.7~5.6V IN, 4.0*1.7mm Power Jack | ||
| + | ::[[File:DC-023.png]] | ||
| + | |||
| + | ==Notes in Hardware Design== | ||
| + | ===EEPROM=== | ||
| + | * The board has an EEPROM(model: 24AA025E48T-I/OT) with a unique MAC. This EEPROM is connected to I2C0 and its address is 0x51 therefore some EEPROM chips cannot be connected to I2C0 which will cause conflicts of addresses. | ||
| + | * In our tests these EEPROM chips cannot be connected to I2C0: 24C04, 24C08 and 24C16. There chips which we tested can be connected to I2C0: 24C01, 24C02 and 24C256 | ||
| + | * For more details about EEPROM address issues refer to http://www.onsemi.com/pub_link/Collateral/CAT24C01-D.PDF | ||
==Get Started== | ==Get Started== | ||
===Essentials You Need=== | ===Essentials You Need=== | ||
| − | Before | + | Before starting to use your NanoPC-T2 get the following items ready |
* NanoPC-T2 | * NanoPC-T2 | ||
* SD Card: Class 10 or Above, minimum 8GB SDHC | * SD Card: Class 10 or Above, minimum 8GB SDHC | ||
| Line 310: | Line 407: | ||
* HDMI monitor or LCD | * HDMI monitor or LCD | ||
* USB keyboard, mouse and possible a USB hub(or a TTL to serial board) | * USB keyboard, mouse and possible a USB hub(or a TTL to serial board) | ||
| − | * A | + | * A host computer running Ubuntu 18.04 64 bit system |
| − | + | {{S5P4418BootFromSDCard|NanoPC-T2}} | |
| − | + | {{BurnOSToEMMC|NanoPC-T2|s5p4418-eflasher}} | |
| − | + | {{S5PXX18MakeSDCardViaSDFusing|NanoPC-T2|sd-fuse_s5p4418}} | |
| − | + | {{ResizeTFCardFS|NanoPC-T2}} | |
| − | + | {{S5Pxx18HDMI|NanoPC-T2|arch/arm/plat-s5p4418/nanopi2/lcds.c}} | |
| − | + | {{S5Pxx18MofidyKernelCommandLineOnHostPC|NanoPC-T2|sd-fuse_s5p4418}} | |
| − | + | {{NanoPCStartToUse|NanoPC-T2}} | |
| − | + | {{FriendlyCoreGeneral|NanoPC-T2}} | |
| − | |- | + | {{FriendlyCoreRunX11Application|NanoPC-T2}} |
| − | | | + | {{FriendlyCoreS5Pxx18|NanoPC-T2}} |
| − | |- | + | {{UbuntuXenial-Armhf-Install-Docker|NanoPC-T2}} |
| − | | | + | {{S5Pxx18Android|NanoPC-T2}} |
| − | | | + | {{MoreOS}} |
| − | + | {{S5P4418BuildFromSource|NanoPC-T2}} | |
| − | + | {{S5P4418-KernelHeaderFile|NanoPC-T2}} | |
| − | + | {{S5Pxx18ExternalModules|NanoPC-T2}} | |
| − | + | {{S5Pxx18AccessHWUnderAndroid|NanoPC-T2}} | |
| − | + | {{S5Pxx18ConnectToLCDModules|NanoPC-T2}} | |
| − | + | {{S5Pxx18HWfiles|NanoPC-T2}} | |
| − | + | {{S5P4418Resources|NanoPC-T2}} | |
| − | + | {{DownloadUrl|NanoPC-T2}} | |
| − | + | {{TechSupport|NanoPC-T2}} | |
| − | + | {{S5P4418ChangeLog}} | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | |- | + | |
| − | | | + | |
| − | + | ||
| − | + | ||
| − | |- | + | |
| − | | | + | |
| − | + | ||
| − | + | ||
| − | |- | + | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | |- | + | |
| − | | | + | |
| − | + | ||
| − | + | ||
| − | |- | + | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | NanoPC- | + | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
Latest revision as of 08:14, 3 July 2024
Contents
- 1 Introduction
- 2 Hardware Spec
- 3 Software Features
- 4 Diagram, Layout and Dimension
- 5 Notes in Hardware Design
- 6 Get Started
- 7 Work with FriendlyCore
- 7.1 Introduction
- 7.2 System Login
- 7.3 Configure System with npi-config
- 7.4 Develop Qt Application
- 7.5 Setup Program to AutoRun
- 7.6 Extend TF Card's Section
- 7.7 Transfer files using Bluetooth
- 7.8 WiFi
- 7.9 Setup Wi-Fi AP
- 7.10 Bluetooth
- 7.11 Ethernet Connection
- 7.12 Custom welcome message
- 7.13 Modify timezone
- 7.14 Select the system default audio device
- 7.15 Run the X11 application
- 7.16 Run Qt 5.10.0 Demo with GPU acceleration
- 7.17 Run Qt 5.10.0 Demo with OpenGL
- 7.18 Play HD Video with Hardware-decoding
- 7.19 Connect to DVP Camera CAM500B
- 7.20 Power Off and Schedule Power On
- 7.21 Installing and Using OpenCV 4.1.2
- 7.22 Installing and Using Caffe
- 7.23 How to install and use docker (for armhf system)
- 8 Work with Android
- 9 More OS Support
- 10 Make Your Own OS Image
- 11 Build Kernel Headers Package
- 12 Installation=
- 13 Connect NanoPC-T2 to External Modules
- 14 Access Hardware under Android
- 15 Connect NanoPC-T2 to FriendlyARM LCD Modules
- 16 Schematics & Mechanical drawing
- 17 Resources
- 18 Source Code and Image Files Download Links
- 19 Tech Support
- 20 Update Log
- 20.1 2023-01-09
- 20.2 2020-10-26
- 20.3 2019-12-28
- 20.4 2019-11-26
- 20.5 2019-11-14
- 20.6 2019-10-18
- 20.7 2019-09-30
- 20.8 2019-07-18
- 20.9 2019-06-25
- 20.10 2019-06-03
- 20.11 2019-01-24
- 20.12 2018-12-17
- 20.13 March-04-2016
- 20.14 March-09-2016
- 20.15 March-23-2016
- 20.16 March-27-2016
- 20.17 April-08-2016
- 20.18 June-30-2016
- 20.19 Sep-04-2016
- 20.20 Sep-27-2016
- 20.21 Nov-2-2016
- 20.22 Nov-17-2016
- 20.23 Dec-7-2016
- 20.24 June-13-2016
- 20.25 June-20-2016
1 Introduction



- The NanoPC-T2 quad core Cortex A9 single board computer is designed and developed by FriendlyARM for professional and enterprise users. It uses the Samsung Quad Core Cortex-A9 S5P4418 SoC with dynamic frequency scaling up to 1.4GHz. Compared to FriendlyARM's existing 4418 based boards the NanoPC-T2 has 8G eMMC onboard, audio jack and video input/output interfaces. Compared to its predecessor the NanoPC-T1 the NanoPC-T2 has built-in WiFi, Bluetooth and Gbps Ethernet port. In addition the NanoPC-T2 has power management which the NanoPC-T1 doesn't support. To avoid overheat issues the NanoPC-T2 has a heat sink with mounting posts.
- The NanoPC-T2 combines all the ports and interfaces the existing FriendlyARM 4418 boards have. Currently it has the most interfaces and ports among all existing ARM boards of this size. Its rich video interfaces and support for HDMI 1080P enable it to work with not only popular display devices but also various FriendlyARM LCDs (both resistive touch and capacitive touch).
- The NanoPC-T2 is FriendlyARM's most complete solution based on Samsung 4418 for both commercial and industrial applications.
2 Hardware Spec
- SoC: Samsung S5P4418 Quad Core Cortex-A9 with dynamic frequency scaling up to 1.4G Hz
- PMU Power Management: Implemented by an MCU, support solftware power-off, and RTC alarm power-on functions
- System Memory: 1GB 32bit DDR3 RAM
- eMMC: 8GB
- Storage: 1 x SD Card Slot
- Ethernet: Gbps Ethernet Port (RTL8211E) with unique MAC
- WiFi: 802.11b/g/n
- Bluetooth: 4.0 dual mode
- Antenna: Porcelain Antenna IPX Interface
- Video Input: DVP Camera/MIPI-CSI (two camera interfaces)
- Video Output: HDMI Type-A / LVDS / LCD / MIPI DSI (four video output interfaces)
- Audio: 3.5 mm audio jack / via HDMI
- Microphone: 1 x onboard Microphone
- USB: 4 x USB 2.0 Host, two standard type A ports and two 2.54mm pitch pin headers
- MicroUSB: 1 x MicroUSB 2.0 Client, Type A
- LCD Interface: 0.5mm pitch 45 pin FPC seat, full color RGB 8-8-8
- HDMI: 1.4A Type A, 1080P
- DVP Camera: 0.5mm pitch 24 pin FPC seat
- GPIO: 2.54 mm pitch 30 pin header
- Serial Debug Port: 2.54mm pitch 4pin header
- LED: 1 x power LED , 2 x GPIO LED
- User Key: 1 x K1 (power), 1 x Reset
- Other Resource: 1 x onboard thermistor
- RTC Battery: RTC Seat Pins
- Power: DC 5V/2A
- Heat Sink: 1 x Heat Sink with mounting holes
- PCB: Six Layer, ENIG
- PCB Dimension: 100 mm x 60 mm
- Working Temperature: -40℃ to 70℃
- OS/Software: u-boot, Android 4.4, Android5.1 and Debian8
3 Software Features
3.1 UbuntuCore
- npi-config: system configuration utility for setting passwords, language, timezone, hostname, SSH and auto-login,and enabling/disabling i2c, spi, serial and PWM
- networkmanager: manage network
- system log output from serial port
- welcome window with basic system information and status
- auto-login with user account "pi" with access to npi-config
- UART2 enabled
- supports CAM500B
3.2 Debian
- supports CAM500B
3.3 Android
- supports setting up static IP
- supports accessing hardware with FriendlyElec's libfriendlyarm-things.so
- integrated iTest utility for testing hardware
4 Diagram, Layout and Dimension
4.1 Layout

- 30Pin GPIO Pin Spec
Pin# Name Pin# Name 1 SYS_3.3V 2 DGND 3 UART2_TX/GPIOD20 4 UART2_RX/GPIOD16 5 I2C0_SCL 6 I2C0_SDA 7 SPI0_MOSI/GPIOC31 8 SPI0_MISO/GPIOD0 9 SPI0_CLK/GPIOC29 10 SPI0_CS/GPIOC30 11 UART3_TX/GPIOD21 12 UART3_RX/GPIOD17 13 UART4_TX/GPIOB29 14 UART4_RX/GPIOB28 15 GPIOB31 16 GPIOB30 17 GPIOC4 18 GPIOC7 19 GPIOC8 20 GPIOC24 21 GPIOC28 22 GPIOB26 23 GPIOD1/PWM0 24 GPIOD8/PPM 25 GPIOC13/PWM1 26 AliveGPIO3 27 GPIOC14/PWM2 28 AliveGPIO5 29 VDD_5V 30 DGND
- LVDS
Pin# Name 1 VDD_5V 2 VDD_5V 3 VDD_5V 4 LVDS_Y0M 5 LVDS_Y0P 6 DGND 7 LVDS_Y1M 8 LVDS_Y1P 9 DGND 10 LVDS_Y2M 11 LVDS_Y2P 12 DGND 13 LVDS_CLKM 14 LVDS_CLKP 15 DGND 16 LVDS_Y3M 17 LVDS_Y3P 18 DGND 19 GPIOB18 20 DGND 21 I2C2_SCL 22 I2C2_SDA 23 GPIOC16 24 DGND
- DVP Camera Interface Pin Spec
Pin# Name 1, 2 SYS_3.3V 7,9,13,15,24 DGND 3 I2C0_SCL 4 I2C0_SDA 5 GPIOB14 6 GPIOB16 8 GPIOC13/PWM1 10 NC 11 VSYNC 12 HREF 14 PCLK 16-23 Data bit7-0
- RGB LCD IF Pin Spec
Pin# Name Description 1, 2 VDD_5V 5V Output, it can be used to power LCD modules 11,20,29, 37,38,39,40, 45 DGND Ground 3-10 Blue LSB to MSB RGB blue 12-19 Green LSB to MSB RGB green 21-28 Red LSB to MSB RGB red 30 GPIOB25 available for users 31 GPIOC15 occupied by FriendlyARM one wire technology to recognize LCD models and control backlight and implement resistive touch, not applicable for users 32 XnRSTOUT Form CPU low when system is reset 33 VDEN signal the external LCD that data is valid on the data bus 34 VSYNC vertical synchronization 35 HSYNC horizontal synchronization 36 LCDCLK LCD clock, Pixel frequency 41 I2C2_SCL I2C2 clock signal, for capacitive touch data transmission 42 I2C2_SDA I2C2 data signal, for capacitive touch data transmission 43 GPIOC16 interrupt pin for capacitive touch, used with I2C2 44 NC Not connected
- MIPI-DSI Interface Pin Spec
Pin# Name 1, 2, 3 VDD_5V 4 DGND 5 I2C2_SDA 6 I2C2_SCL 7 DGND 8 GPIOC16 9 DGND 10 GPIOC1 11 DGND 12 GPIOA28 13 nRESETOUT 14, 15 DGND 16 MIPIDSI_DN3 17 MIPIDSI_DP3 18 DGND 19 MIPIDSI_DN2 20 MIPIDSI_DP2 21 DGND 22 MIPIDSI_DN1 23 MIPIDSI_DP1 24 DGND 25 MIPIDSI_DN0 26 MIPIDSI_DP0 27 DGND 28 MIPIDSI_DNCLK 29 MIPIDSI_DPCLK 30 DGND
- MIPI-CSI Interface Pin Spec
Pin# Name 1, 2 SYS_3.3V 3 DGND 4 I2C0_SDA 5 I2C0_SCL 6 DGND 7 SPI2_MOSI/GPIOC12 8 SPI2_MISO/GPIOC11 9 SPI2_CS/GPIOC10 10 SPI2_CLK/GPIOC9 11 DGND 12 GPIOB23 13 GPIOC2 14 GPIOC13/PWM1 15 DGND 16 MIPICSI_DN3 17 MIPICSI_DP3 18 DGND 19 MIPICSI_DN2 20 MIPICSI_DP2 21 DGND 22 MIPICSI_DN1 23 MIPICSI_DP1 24 DGND 25 MIPICSI_DN0 26 MIPICSI_DP0 27 DGND 28 MIPICSI_DNCLK 29 MIPICSI_DPCLK 30 DGND
- Note:
- SYS_3.3V: 3.3V power output
- VDD_5V: 5V power output
- For more details refer to the document: NanoPC-T2-T3-Schematic.pdf
4.2 Board Dimension

- For more details refer to the document: NanoPC-T2-T3_1711_Draw_dxf.zip
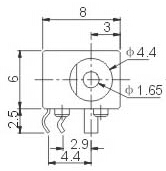
- Power Jack
- DC 4.7~5.6V IN, 4.0*1.7mm Power Jack

5 Notes in Hardware Design
5.1 EEPROM
- The board has an EEPROM(model: 24AA025E48T-I/OT) with a unique MAC. This EEPROM is connected to I2C0 and its address is 0x51 therefore some EEPROM chips cannot be connected to I2C0 which will cause conflicts of addresses.
- In our tests these EEPROM chips cannot be connected to I2C0: 24C04, 24C08 and 24C16. There chips which we tested can be connected to I2C0: 24C01, 24C02 and 24C256
- For more details about EEPROM address issues refer to http://www.onsemi.com/pub_link/Collateral/CAT24C01-D.PDF
6 Get Started
6.1 Essentials You Need
Before starting to use your NanoPC-T2 get the following items ready
- NanoPC-T2
- SD Card: Class 10 or Above, minimum 8GB SDHC
- A DC 5V/2A power is a must
- HDMI monitor or LCD
- USB keyboard, mouse and possible a USB hub(or a TTL to serial board)
- A host computer running Ubuntu 18.04 64 bit system
6.2 Boot from SD Card
Get the following files from here download link:
- Get a 8G SDHC card and backup its data if necessary.
| Image Files | |
| s5p4418-sd-friendlycore-xenial-4.4-armhf-YYYYMMDD.img.zip | FriendlyCore with Qt 5.10.0 (base on Ubuntu core) image file |
| s5p4418-sd-lubuntu-desktop-xenial-4.4-armhf-YYYYMMDD.img.zip | LUbuntu Desktop image file with X Window |
| s5p4418-sd-friendlywrt-4.4-YYYYMMDD.img.zip | FriendlyWrt image file (base on OpenWrt) |
| s5p4418-sd-android7-YYYYMMDD.img.zip | Android7 image file |
| s5p4418-sd-android-kitkat-YYYYMMDD.img.zip | Android4.4 image file with support for 4G LTE |
| s5p4418-sd-android-lollipop-YYYYMMDD.img.zip | Android5.1 image file |
| s5p4418-eflasher-lubuntu-desktop-xenial-4.4-armhf-YYYYMMDD.img.zip | SD card image, which is used to install a lubuntu desktop to eMMC |
| s5p4418-eflasher-friendlywrt-4.4-YYYYMMDD.img.zip | SD card image, which is used to install a FriendlyWrt to eMMC |
| s5p4418-eflasher-android7-YYYYMMDD.img.zip | SD card image, which is used to install a android7 to eMMC |
| s5p4418-eflasher-friendlycore-xenial-4.4-armhf-YYYYMMDD.img.zip | SD card image, which is used to install a friendly-core to eMMC |
| s5p4418-eflasher-android-kitkat-YYYYMMDD.img.zip | SD card image, which is used to install a android4 to eMMC |
| s5p4418-eflasher-android-lollipop-YYYYMMDD.img.zip | SD card image, which is used to install a android5 to eMMC |
| Flash Utility: | |
| win32diskimager.rar | Windows utility. Under Linux users can use "dd" |
- Uncompress these files. Insert an SD card(at least 4G) into a Windows PC and run the win32diskimager utility as administrator. On the utility's main window select your SD card's drive, the wanted image file and click on "write" to start flashing the SD card.
- Insert this card into your board's boot slot, press and hold the boot key (only applies to a board with onboard eMMC) and power on (with a 5V/2A power source). If the PWR LED is on and LED1 is blinking this indicates your board has successfully booted.
6.3 Flash image to eMMC with eflasher
- Download eflasher image file
An image file's name is as : s5p4418-eflasher-OSNAME-YYYYMMDD.img.zip
The "OSNAME" is the name of an OS e.g. android, friendlycore and etc;
This image file is used for making an installation SD card and it contains a Ubuntu core system and a utility EFlasher;
Download s5p4418-eflasher-OSNAME-YYYYMMDD.img.zip to a host PC and get a windows utility win32diskimager.rar as well;
- Make Installation SD Card with eflasher
Extract the package with a 7z utility and you will get a file with an extension ".img". Insert an SDHC card(minimum 8G or above) to a PC running Windows, run the Win32DiskImager utility as administrator, click on "Image File" to select your wanted file, select your SD card and click on "Write" to start flashing the Image to your SD card;
If your PC runs Linux you can command "dd" to extract the package and get an ".img" file and write it to your SD card;
- Operate in GUI Window: Flash OS to eMMC
Insert your SD card to NanoPC-T2, connect an HDMI monitor or LCD to your board, press and hold the "boot" key beside the Ethernet port, power on the board you will see a pop-up window asking you to select an OS for installation. Select your wanted OS and start installation.
- Operate in Commandline Utility: Flash OS to eMMC
Insert an installation SD card to NanoPC-T2, log into or SSH to your board and run the following command to start EFlasher:
sudo eflasher6.3.1 Make Installation Card under Linux Desktop
- 1) Insert your SD card into a host computer running Ubuntu and check your SD card's device name
dmesg | tail
Search the messages output by "dmesg" for similar words like "sdc: sdc1 sdc2". If you can find them it means your SD card has been recognized as "/dev/sdc". Or you can check that by commanding "cat /proc/partitions"
- 2) Downlaod Linux script
git clone https://github.com/friendlyarm/sd-fuse_s5p4418.git
cd sd-fuse_s5p4418
- 3) Here is how to make a Lubuntu desktop SD card
sudo ./fusing.sh /dev/sdx lubuntu
(Note: you need to replace "/dev/sdx" with the device name in your system)
When you run the script for the first time it will prompt you to download an image you have to hit “Y” within 10 seconds otherwise you will miss the download
- 4) Run this command to make a complete image file:
sudo ./mkimage.sh lubuntu
More content please refre: Assembling the SD card image yourself
6.4 Extend SD Card Section
- When Debian/Ubuntu is loaded the SD card's section will be automatically extended.
- When Android is loaded you need to run the following commands on your host PC to extend your SD card's section:
sudo umount /dev/sdx? sudo parted /dev/sdx unit % resizepart 4 100 resizepart 7 100 unit MB print sudo resize2fs -f /dev/sdx7
(Note: you need to replace "/dev/sdx" with the device name in your system)
6.5 LCD/HDMI Resolution
When the system boots our uboot will check whether it is connected to an LCD or to an HDMI monitor. If it recognizes an LCD it will configure its resolution. Our uboot defaults to the HDMI 720P configuration.
If you want to modify the LCD resolution you can modify file "arch/arm/plat-s5p4418/nanopi2/lcds.c" in the kernel and recompile it.
If your NanoPC-T2 is connected to an HDMI monitor and it runs Android it will automatically set the resolution to an appropriate HDMI mode by checking the "EDID". If your NanoPC-T2 is connected to an HDMI monitor and it runs Debian by default it will set the resolution to the HDMI 720P configuration. If you want to modify the HDMI resolution to 1080P modify your kernel's configuration as explained above.
6.6 Update SD Card's boot parameters From PC Host
Insert your SD card into a host PC running Linux, if you want to change your kernel command line parameters you can do it via the fw_setevn utility.
Check the current Command Line:
git clone https://github.com/friendlyarm/sd-fuse_s5p4418.git
cd sd-fuse_s5p4418/tools
./fw_printenv /dev/sdx | grep bootargs
For example, to disable android SELinux, You can change it this way:
./fw_setenv /dev/sdc bootargs XXX androidboot.selinux=permissive
The "XXX" stands for the original bootargs' value.
6.7 Run Android or Linux (TODO)
- 将制作好SD卡插入NanoPC-T2,连接HDMI,按住靠近网口的boot按键,最后接电源(5V 2A)拨动开关,NanoPC-T2会从SD卡启动。你可以看到板上PWR灯常亮,LED1灯闪烁,这说明系统已经开始启动了,同时电视上也将能看到系统启动的画面。
- 要在电视上进行操作,你需要连接USB鼠标和键盘;如果你选购了LCD配件,则可以直接使用LCD上面的触摸屏进行操作。
7 Work with FriendlyCore
7.1 Introduction
FriendlyCore is a light Linux system without X-windows, based on ubuntu core, It uses the Qt-Embedded's GUI and is popular in industrial and enterprise applications.
Besides the regular Ubuntu core's features our FriendlyCore has the following additional features:
- it supports our LCDs with both capacitive touch and resistive touch(S700, X710, HD702, S430, HD101 and S70)
- it supports WiFi
- it supports Ethernet
- it supports Bluetooth and has been installed with bluez utilities
- it supports audio playing
- it supports Qt 5.10.0 EGLES and OpenGL ES1.1/2.0 (Only for S5P4418/S5P6818)
7.2 System Login
- If your board is connected to an HDMI monitor you need to use a USB mouse and keyboard.
- If you want to do kernel development you need to use a serial communication board, ie a PSU-ONECOM board, which will
For example, NanoPi-M1:
You can use a USB to Serial conversion board too.
Make sure you use a 5V/2A power to power your board from its MicroUSB port:
For example, NanoPi-NEO2:
- FriendlyCore User Accounts:
Non-root User:
User Name: pi Password: pi
Root:
User Name: root Password: fa
The system is automatically logged in as "pi". You can do "sudo npi-config" to disable auto login.
- Update packages
$ sudo apt-get update
7.3 Configure System with npi-config
The npi-config is a commandline utility which can be used to initialize system configurations such as user password, system language, time zone, Hostname, SSH switch , Auto login and etc. Type the following command to run this utility.
$ sudo npi-config
Here is how npi-config's GUI looks like:

7.4 Develop Qt Application
Please refer to: How to Build and Install Qt Application for FriendlyELEC Boards
7.5 Setup Program to AutoRun
You can setup a program to autorun on system boot with npi-config:
sudo npi-configGo to Boot Options -> Autologin -> Qt/Embedded, select Enable and reboot.
7.6 Extend TF Card's Section
When FriendlyCore is loaded the TF card's section will be automatically extended.You can check the section's size by running the following command:
$ df -h
7.7 Transfer files using Bluetooth
Take the example of transferring files to the mobile phone. First, set your mobile phone Bluetooth to detectable status, then execute the following command to start Bluetooth search.:
hcitool scan
Search results look like:
Scanning ...
2C:8A:72:1D:46:02 HTC6525LVWThis means that a mobile phone named HTC6525LVW is searched. We write down the MAC address in front of the phone name, and then use the sdptool command to view the Bluetooth service supported by the phone:
sdptool browser 2C:8A:72:1D:46:02
Note: Please replace the MAC address in the above command with the actual Bluetooth MAC address of the mobile phone.
This command will detail the protocols supported by Bluetooth for mobile phones. What we need to care about is a file transfer service called OBEX Object Push. Take the HTC6525LVW mobile phone as an example. The results are as follows:
Service Name: OBEX Object Push Service RecHandle: 0x1000b Service Class ID List: "OBEX Object Push" (0x1105) Protocol Descriptor List: "L2CAP" (0x0100) "RFCOMM" (0x0003) Channel: 12 "OBEX" (0x0008) Profile Descriptor List: "OBEX Object Push" (0x1105) Version: 0x0100
As can be seen from the above information, the channel used by the OBEX Object Push service of this mobile phone is 12, we need to pass it to the obexftp command, and finally the command to initiate the file transfer request is as follows:
obexftp --nopath --noconn --uuid none --bluetooth -b 2C:8A:72:1D:46:02 -B 12 -put example.jpg
Note: Please replace the MAC address, channel and file name in the above command with the actual one.
After executing the above commands, please pay attention to the screen of the mobile phone. The mobile phone will pop up a prompt for pairing and receiving files. After confirming, the file transfer will start.
Bluetooth FAQ:
1) Bluetooth device not found on the development board, try to open Bluetooth with the following command:
rfkill unblock 02) Prompt can not find the relevant command, you can try to install related software with the following command:
apt-get install bluetooth bluez obexftp openobex-apps python-gobject ussp-push7.8 WiFi
For either an SD WiFi or a USB WiFi you can connect it to your board in the same way. The APXX series WiFi chips are SD WiFi chips. By default FriendlyElec's system supports most popular USB WiFi modules. Here is a list of the USB WiFi modules we tested:
Index Model 1 RTL8188CUS/8188EU 802.11n WLAN Adapter 2 RT2070 Wireless Adapter 3 RT2870/RT3070 Wireless Adapter 4 RTL8192CU Wireless Adapter 5 mi WiFi mt7601 6 5G USB WiFi RTL8821CU 7 5G USB WiFi RTL8812AU
You can use the NetworkManager utility to manage network. You can run "nmcli" in the commandline utility to start it. Here are the commands to start a WiFi connection:
- Change to root
$ su root
- Check device list
$ nmcli devNote: if the status of a device is "unmanaged" it means that device cannot be accessed by NetworkManager. To make it accessed you need to clear the settings under "/etc/network/interfaces" and reboot your system.
- Start WiFi
$ nmcli r wifi on- Scan Surrounding WiFi Sources
$ nmcli dev wifi- Connect to a WiFi Source
$ nmcli dev wifi connect "SSID" password "PASSWORD" ifname wlan0
The "SSID" and "PASSWORD" need to be replaced with your actual SSID and password.If you have multiple WiFi devices you need to specify the one you want to connect to a WiFi source with iface
If a connection succeeds it will be automatically setup on next system reboot.
For more details about NetworkManager refer to this link: Use NetworkManager to configure network settings
If your USB WiFi module doesn't work most likely your system doesn't have its driver. For a Debian system you can get a driver from Debian-WiFi and install it on your system. For a Ubuntu system you can install a driver by running the following commands:
$ apt-get install linux-firmware
In general all WiFi drivers are located at the "/lib/firmware" directory.
7.9 Setup Wi-Fi AP
Follow the steps below. Since our OS image by default already has the NetworkManager utility you will be prompted to uninstall it first:
sudo turn-wifi-into-apmode yes
After you uninstall the NetworkManager reboot your board.
After your board is rebooted run the above commands again and you will be prompted to type in a WIFI's name and password. Type in your wanted name and password
If this is successful you will be able to find and connect your board to a WIFI. Login to your board at 192.168.8.1:
ssh root@192.168.8.1
Type in a password. In our system the password is "fa".
To login smoothly via SSH we recommend you turning off WIFI's power save mode by running the following commands:
sudo iwconfig wlan0 power offYou can check your WiFi's mode by running the following command:
sudo cat /sys/module/bcmdhd/parameters/op_mode
Number 2 means your WiFi is in AP mode. You can switch to the Station mode by running the following command:
sudo turn-wifi-into-apmode no7.10 Bluetooth
Search for surrounding bluetooth devices by running the following command:
$ su root
$ hciconfig hci0 up
$ hcitool scanYou can run "hciconfig" to check bluetooth's status.
7.11 Ethernet Connection
If a board is connected to a network via Ethernet before it is powered on it will automatically obtain an IP with DHCP activated after it is powered up. If you want to set up a static IP refer to: Use NetworkManager to configure network settings。
7.12 Custom welcome message
The welcome message is printed from the script in this directory:
/etc/update-motd.d/
For example, to change the FriendlyELEC LOGO, you can change the file /etc/update-motd.d/10-header. For example, to change the LOGO to HELLO, you can change the following line:
TERM=linux toilet -f standard -F metal $BOARD_VENDOR
To:
TERM=linux toilet -f standard -F metal HELLO
7.13 Modify timezone
For exampe, change to Shanghai timezone:
sudo rm /etc/localtime sudo ln -ls /usr/share/zoneinfo/Asia/Shanghai /etc/localtime
7.14 Select the system default audio device
You can set the system default audio device by following the steps below.
Use the following command to view all the sound card devices in the system (Note: different development boards will have different results):
pi@NanoPi:~$ aplay -l **** List of PLAYBACK Hardware Devices **** card 0: nanopi2audio [nanopi2-audio], device 0: c0055000.i2s-ES8316 HiFi ES8316 HiFi-0 [] Subdevices: 1/1 Subdevice #0: subdevice #0 card 0: nanopi2audio [nanopi2-audio], device 1: c0059000.spdiftx-dit-hifi dit-hifi-1 [] Subdevices: 1/1 Subdevice #0: subdevice #0
As you can see, the following sound card devices are available on the hardware:
Sound card device Sound card number Description nanopi2audio device 0 3.5mm jack interface nanopi2audio device 1 HDMI
To configure the audio output to the 3.5mm jack, create or modify the configuration file /etc/asound.conf and modify it to the following:
pcm.!default { type hw card 0 device 0 } ctl.!default { type hw card 0 }
To configure to output audio to HDMI, change the device 0 above to device 1.
7.15 Run the X11 application
FriendlyCore system built-in lightweight Xorg,although there is no window manager, you can still run a single X-Windows application,For example, the program to run is ~/YourX11App,use the following command:
. /usr/bin/setqt5env-xcb startx ~/YourX11App -geometry 1280x800
Note that there is a space between "." and /usr/bin/setqt5env-xcb. In addition, the resolution after -geometry should be changed to the actual resolution of your screen.
7.16 Run Qt 5.10.0 Demo with GPU acceleration
Run the following command
$ sudo qt5demo

7.17 Run Qt 5.10.0 Demo with OpenGL
Run the following command
. setqt5env cd $QTDIR cd /examples/opengl/qopenglwidget ./qopenglwidget
For more Qt 5.10.0 examples, please go to:
cd $QTDIR/examples/
7.18 Play HD Video with Hardware-decoding
gst-player is console player, it base on GStreamer, support VPU with Hardware-decoding:
sudo gst-player /home/pi/demo.mp4
The equivalent gsteamer command is as follows:
sudo gst-launch-1.0 filesrc location=/home/pi/demo.mp4 ! qtdemux name=demux demux. ! queue ! faad ! audioconvert ! audioresample ! alsasink device="hw:0,DEV=1" demux. ! queue ! h264parse ! nxvideodec ! nxvideosink dst-x=0 dst-y=93 dst-w=1280 dst-h=533
7.19 Connect to DVP Camera CAM500B
The CAM500B camera module is a 5M-pixel camera with DVP interface. For more tech details about it you can refer to Matrix - CAM500B.
Enter the following command to preview the video:
gst-launch-1.0 -e v4l2src device=/dev/video6 ! video/x-raw,format=I420,framerate=30/1,width=1280,height=720 ! nxvideosink
Enter the following command to start recording (VPU hardware encoding):
gst-launch-1.0 -e v4l2src device=/dev/video6 ! video/x-raw,format=I420,framerate=30/1,width=1280,height=720 ! tee name=t t. \ ! queue ! nxvideosink t. ! queue ! nxvideoenc bitrate=12000000 ! mp4mux ! \ filesink location=result_720.mp4
7.20 Power Off and Schedule Power On
“PMU Power Management” feature helps us to auto power on the board at a specific time, it is implemented by an MCU, support software power-off, and RTC alarm power-up functions.
Here’s a simple guide:
Turn on automatically after 100 seconds. (Time must be greater than 60 seconds.):
$ sudo echo 100 > /sys/class/i2c-dev/i2c-3/device/3-002d/wakealarm
After setting up the automatic boot, turn off board with the 'poweroff’ command:
$ sudo poweroff
Cancel automatic boot:
$ sudo echo 0 > /sys/class/i2c-dev/i2c-3/device/3-002d/wakealarm
Query the current settings, in the front is current time, followed by the time of automatic booting: If no automatic boot is set, it will display "disabled”.
$ sudo cat /sys/class/i2c-dev/i2c-3/device/3-002d/wakealarm
Note that some older versions of hardware may not support this feature, if you don't see this file node in your system:
/sys/class/i2c-dev/i2c-3/device/3-002d/wakealarm
your board may be it does not support this feature.
7.21 Installing and Using OpenCV 4.1.2
OpenCV has been pre-installed in FriendlyCore (Version after 20191126) and does not require manual installation.
Please refre this link: https://github.com/friendlyarm/install-opencv-on-friendlycore/blob/s5pxx18/README.md
Quick test:
. /usr/bin/cv-env.sh . /usr/bin/setqt5env-eglfs cd /usr/local/share/opencv4/samples/python python3 turing.py
7.22 Installing and Using Caffe
git clone https://github.com/friendlyarm/install-caffe-on-friendlycore cd install-caffe-on-friendlycore sudo ./install-caffe.sh
7.23 How to install and use docker (for armhf system)
7.23.1 How to Install Docker
Run the following commands:
sudo apt-get update sudo apt-get install docker.io
7.23.2 Test Docker installation
Test that your installation works by running the simple docker image:
git clone https://github.com/friendlyarm/debian-jessie-arm-docker cd debian-jessie-arm-docker ./rebuild-image.sh ./run.sh
8 Work with Android
8.1 Work with 4G Module EC20 under Android5
8.1.1 Hardware Setup
Connect an EC20 module to a USB to miniPCIe board and connect the board to an ARM board's USB Host. Here is a hardware setup:

Power on the board and you will be able to surf the internet with the 4G module like using an Android phone.
8.2 Modify the Android boot Logo
Replace the logo.bmp:
/opt/FriendlyARM/smart4418/android/device/friendly-arm/nanopi3/boot/logo.bmp /opt/FriendlyARM/smart4418/android/device/friendly-arm/nanopi2/boot/logo.bmp
Replace the bootanimation.zip:
/opt/FriendlyARM/smart4418/android/device/friendly-arm/nanopi3/bootanimation.zip /opt/FriendlyARM/smart4418/android/device/friendly-arm/nanopi2/bootanimation.zip
Re-compile android.
8.3 Use fastboot command to flash android firmware
Enter the uboot command line mode on the serial terminal when powering on, and then enter the following command:
fastboot 0For S5P4418:
fastboot flash partmap partmap.txt fastboot flash 2ndboot bl1-mmcboot.bin fastboot flash fip-loader loader-mmc.img fastboot flash fip-secure bl_mon.img fastboot flash fip-nonsecure bootloader.img fastboot flash boot boot.img fastboot flash system system.img fastboot flash cache cache.img fastboot flash userdata userdata.img
For S5P6818:
fastboot flash partmap partmap.txt fastboot flash 2ndboot bl1-mmcboot.bin fastboot flash fip-loader fip-loader.img fastboot flash fip-secure fip-secure.img fastboot flash fip-nonsecure fip-nonsecure.img fastboot flash boot boot.img fastboot flash system system.img fastboot flash cache cache.img fastboot flash userdata userdata.img
8.4 Android Keys
Android 5:
vendor/friendly-arm/nanopi3/security/
Android 7:
build/target/product/security/
8.5 Optimizing HDMI Performance on Android 7
8.5.1 Note
By default, the driver initializes two framebuffers, one for the primary LCD display and the other for HDMI. If your project specifically requires the use of HDMI and not the LCD, you can follow the steps outlined in this chapter to make modifications. After making these changes, HDMI will be configured as the primary display, resulting in the initialization of only one framebuffer. This optimization conserves resources and leads to corresponding improvements in UI performance and boot speed.
The content of this chapter is applicable exclusively to S5P6818 running Android 7. For S5P4418, the modification process is similar, with adjustments needed in the corresponding files.
8.5.2 Modify the kernel
You need to modify the kernel Device Tree Source (DTS) to disable the dp_drm_lvds node, as shown below:
--- a/arch/arm64/boot/dts/nexell/s5p6818-nanopi3-common.dtsi +++ b/arch/arm64/boot/dts/nexell/s5p6818-nanopi3-common.dtsi @@ -810,6 +810,7 @@ plane-names = "video", "rgb", "primary"; }; port@1 { + status = "disabled"; reg = <1>; back_color = < 0x0 >; color_key = < 0x0 >; @@ -820,7 +821,7 @@ &dp_drm_lvds { remote-endpoint = <&lcd_panel>; - status = "ok"; + status = "disabled"; display-timing { clock-frequency = <50000000>;
After compilation, you will obtain a new arch/arm64/boot/dts/nexell/s5p6818-nanopi3-rev*.dtb file.
During the testing phase, you can directly update it to the board using adb with the following command:
adb root; adb wait-for-device; adb shell mkdir /storage/sdcard1/; adb shell mount -t ext4 /dev/block/mmcblk0p1 /storage/sdcard1/ adb push arch/arm64/boot/dts/nexell/s5p6818-nanopi3-rev*.dtb /storage/sdcard1/
For a complete firmware update, you will need to replace the files in the device/friendlyelec/nanopi3/boot directory of the Android 7 source code.
8.5.3 Modify env.conf
To modify the device/friendlyelec/nanopi3/boot/env.conf file and add a line
lcdtype HDMI1080P60
This mode needs to match the mode detected by Android 7 after startup; otherwise, it may result in a prolonged black screen state or even no display output. In such cases, you may need to manually set it in the U-Boot command-line environment:
setenv lcdtype HDMI1080P60; saveenv; reset
8.5.4 Modify system.prop
To modify the device/friendlyelec/nanopi3/system.prop file in Android 7
ro.sf.lcd_density=240Alternatively, you can adjust the system property or experiment with different values that you deem more appropriate. You can also use the following command to change the display density under the serial or adb environment and observe if the effect is suitable:
adb shell wm density 2408.5.5 Compiling Android
Follow the instructions in the wiki to compile Android 7 and conduct testing. If you encounter any exceptions, please carefully review the preceding steps.
9 More OS Support
9.1 DietPi
![]()
DietPi is a highly optimised & minimal Debian-based Linux distribution. DietPi is extremely lightweight at its core, and also extremely easy to install and use.
Setting up a single board computer (SBC) or even a computer, for both regular or server use, takes time and skill. DietPi provides an easy way to install and run favourite software you choose.
For more information, please visit this link https://dietpi.com/docs/.
DietPi supports many of the NanoPi board series, you may download the image file from here:
10 Make Your Own OS Image
10.1 Install Cross Compiler
10.1.1 Install arm-linux-gcc 4.9.3
Download the compiler package:
git clone https://github.com/friendlyarm/prebuilts.git -b master --depth 1 cd prebuilts/gcc-x64 cat toolchain-4.9.3-armhf.tar.gz* | sudo tar xz -C /
Then add the compiler's directory to "PATH" by appending the following lines in "~/.bashrc":
export PATH=/opt/FriendlyARM/toolchain/4.9.3/bin:$PATH export GCC_COLORS=auto
Execute "~/.bashrc" to make the changes take effect. Note that there is a space after the first ".":
. ~/.bashrcThis compiler is a 64-bit one therefore it cannot be run on a 32-bit Linux machine. After the compiler is installed you can verify it by running the following commands:
arm-linux-gcc -v Using built-in specs. COLLECT_GCC=arm-linux-gcc COLLECT_LTO_WRAPPER=/opt/FriendlyARM/toolchain/4.9.3/libexec/gcc/arm-cortexa9-linux-gnueabihf/4.9.3/lto-wrapper Target: arm-cortexa9-linux-gnueabihf Configured with: /work/toolchain/build/src/gcc-4.9.3/configure --build=x86_64-build_pc-linux-gnu --host=x86_64-build_pc-linux-gnu --target=arm-cortexa9-linux-gnueabihf --prefix=/opt/FriendlyARM/toolchain/4.9.3 --with-sysroot=/opt/FriendlyARM/toolchain/4.9.3/arm-cortexa9-linux-gnueabihf/sys-root --enable-languages=c,c++ --with-arch=armv7-a --with-tune=cortex-a9 --with-fpu=vfpv3 --with-float=hard ... Thread model: posix gcc version 4.9.3 (ctng-1.21.0-229g-FA)
10.2 Compile Linux kernel for FriendlyCore/Lubuntu/EFlasher
10.2.1 Compile Kernel
- Download Kernel Source Code
git clone https://github.com/friendlyarm/linux.git -b nanopi2-v4.4.y --depth 1 cd linux
The NanoPC-T2's kernel source code is in the "nanopi2-v4.4.y" branch.You need to switch to this branch.
- Compile Ubuntu Kernel
touch .scmversion make ARCH=arm nanopi2_linux_defconfig make ARCH=arm
After your compilation succeeds an "arch/arm/boot/zImage" will be generated and a DTB file(s5p4418-nanopi2-rev*.dtb) will be generated in the "arch/arm/boot/dts/" directory. You can use them to replace the existing zImage and DTB files in the boot partition of your bootable SD card.
10.2.2 Use Your Generated Kernel
- Update kernel in SD card
If you use an SD card to boot Ubuntu you can copy your generated zImage and DTB files to your SD card's boot partition(e.g. partition 1 /dev/sdX1).
- Update kernel in eMMC
If you boot your board from eMMC you can update your kernel file by following the steps below:
1) Usually after OS is loaded eMMC's boot partition (in our example eMMC's device name was /dev/mmcblk0p1) will be automatically mounted and you can verify that by running "mount"
2) Connect your board to a host PC running Ubuntu and copy the zImage and DTB files to eMMC's boot partition
3) Or you can copy your generated kernel file to an external storage card(e.g. an SD card or a USB drive), connect the storage card to your board the move the file from the card to eMMC's boot partition
4) After update is done type "reboot" to reboot your board. Note: don't just directly disconnect your board from its power source or press the reset button to reboot the board. These actions will damage your kernel file
- Generate Your boot.img
Refer to this repo: https://github.com/friendlyarm/sd-fuse_s5p4418
10.3 Compile Linux kernel for Android7
The Android 7.1.2 source code already contains the pre-compiled kernel. If you need to customize it, you can compile the kernel according to the following guide.
git clone https://github.com/friendlyarm/linux.git -b nanopi2-v4.4.y --depth 1 cd linux touch .scmversion make ARCH=arm nanopi2_nougat_defconfig make ARCH=arm
The newly generated kernel is arch/arm/boot/zImage,The new DTB file is also included under the directory arch/arm/boot/dts/.(s5p4418-nanopi2-rev*.dtb).
If you only want to debug the kernel, you can quickly update it with adb:
adb root; adb shell mkdir /storage/sdcard1/; adb shell mount -t ext4 /dev/block/mmcblk0p1 /storage/sdcard1/; adb push arch/arm/boot/zImage arch/arm/boot/dts/s5p4418-nanopi2-rev*.dtb /storage/sdcard1/
If you want to generate boot.img for burning, you can copy the kernel zImage and DTB files to the Android7 source code directory: device/friendlyelec/nanopi2/boot, then recompile Android7.
10.4 Compile U-Boot for Android7/FriendlyCore/Lubuntu/EFlasher
Download the U-Boot source code and compile it. Note that the github's branch is nanopi2-v2016.01:
git clone https://github.com/friendlyarm/u-boot.git cd u-boot git checkout nanopi2-v2016.01 make s5p4418_nanopi2_defconfig make CROSS_COMPILE=arm-linux-
After your compilation succeeds a bootloader.img will be generated. If you want to test it flash it to your installation SD card to replace an existing U-Boot v2016.01 file via fastboot, sd-fuse_s5p4418 or eflasher ROM.
For Android7: Copy bootloader.img to Android7 source directory device/friendlyelec/nanopi2/boot, then recompile Android7.
Note: you cannot use mixed U-Boot files. For example you cannot use fastboot to update an existing U-Boot V2014.07 and you cannot use bootloader.img to replace an existing u-boot.bin
10.5 Compile Android 7.1.2
10.5.1 Install Cross Compiler
Install 64 bit Ubuntu 16.04 on your host PC.
sudo apt-get install bison g++-multilib git gperf libxml2-utils make python-networkx zip sudo apt-get install flex curl libncurses5-dev libssl-dev zlib1g-dev gawk minicom sudo apt-get install openjdk-8-jdk sudo apt-get install exfat-fuse exfat-utils device-tree-compiler liblz4-tool
For more details refer to https://source.android.com/source/initializing.html 。
10.5.2 Download Android7 Source Code
There are two ways to download the source code:
- repo archive file on netdisk
Netdisk URL: Click here
File location on netdisk:sources/s5pxx18-android-7.git-YYYYMMDD.tar (YYYYMMDD means the date of packaging)
After extracting the repo package from the network disk, you need to execute the sync.sh script, which will pull the latest code from gitlab:
tar xvf /path/to/netdisk/sources/s5pxx18-android-7.git-YYYYMMDD.tar cd s5pxx18-android-7 ./sync.sh
- git clone from gitlab
NanoPC-T2 source code is maintained in gitlab, You can download it by running the following command:
git clone https://gitlab.com/friendlyelec/s5pxx18-android-7.git -b master
10.5.3 Compile Android7
cd s5pxx18-android-7 source build/envsetup.sh lunch aosp_nanopi2-userdebug make -j8
After your compilation succeeds the following files will be generated in the "out/target/product/nanopi2/" directory.
filename partition Description bl1-mmcboot.bin raw boot firmware loader-mmc.img raw boot firmware bl_mon.img raw boot firmware bootloader.img raw uboot-v2016.01 env.conf - Uboot environment variable containing Android kernel command line parameters boot.img boot kernel zImage, DTBs; logo; Android ramdisk cache.img cache - userdata.img userdata - system.img system - partmap.txt - Partition description file
11 Build Kernel Headers Package
The following commands need to be executed on the development board:
11.1 Software Version
The OS image file name: s5p4418-sd-friendlycore-xenial-4.4-armhf-YYYYMMDD.img, s5p4418-eflasher-friendlycore-xenial-4.4-armhf-YYYYMMDD.img
pi@NanoPC-T2:~$ lsb_release -a No LSB modules are available. Distributor ID: Ubuntu Description: Ubuntu 16.04.6 LTS Release: 16.04 Codename: xenial pi@NanoPC-T2:~$ cat /proc/version Linux version 4.4.172-s5p4418 (root@jensen) (gcc version 7.5.0 (ctng-1.24.0-108g-FA) ) #1 SMP PREEMPT Wed Mar 24 15:17:25 CST 2021
11.2 Install the required packages
sudo apt-get update sudo apt-get install -y dpkg-dev bsdtar
11.3 Build Kernel Headers Package
git clone https://github.com/friendlyarm/linux -b nanopi2-v4.4.y --depth 1 kernel-s5pxx18-arm cd kernel-s5pxx18-arm rm -rf .git make distclean touch .scmversion make CROSS_COMPILE= ARCH=arm nanopi2_linux_defconfig alias tar=bsdtar make CROSS_COMPILE= ARCH=arm bindeb-pkg -j4
The following message is displayed to indicate completion:
dpkg-deb: building package 'linux-firmware-image-4.4.172-s5p4418' in '../linux-firmware-image-4.4.172-s5p4418_4.4.172-s5p4418-1_armhf .deb'. dpkg-deb: building package 'linux-headers-4.4.172-s5p4418' in '../linux-headers-4.4.172-s5p4418_4.4.172-s5p4418-1_armhf.deb'. dpkg-deb: building package 'linux-libc-dev' in '../linux-libc-dev_4.4.172-s5p4418-1_armhf.deb'. dpkg-deb: building package 'linux-image-4.4.172-s5p4418' in '../linux-image-4.4.172-s5p4418_4.4.172-s5p4418-1_armhf.deb'. dpkg-genchanges: binary-only upload (no source code included)
12 Installation=
sudo rm -f /lib/modules/4.4.172-s5p4418/build sudo rm -f /lib/modules/4.4.172-s5p4418/source sudo dpkg -i ../linux-headers-4.4.172-s5p4418_4.4.172-s5p4418-1_armhf.deb
12.1 Testing
To compile the pf_ring module as an example, refer to the documentation: https://www.ntop.org/guides/pf_ring/get_started/git_installation.html.
git clone https://github.com/ntop/PF_RING.git cd PF_RING/kernel/ make CROSS_COMPILE=
After compiling, use insmod to try to load the module:
sudo insmod ./pf_ring.ko
13 Connect NanoPC-T2 to External Modules
13.1 Connect NanoPC-T2 to USB Camera(FA-CAM202)
- In this use case the NanoPC-T2 runs Debian. If you connect your NanoPC-T2 to our LCD or an HDMI monitor after Debain is fully loaded click on "other"-->"xawtv" on the left bottom of the GUI and the USB Camera application will be started. After enter "welcome to xawtv!" click on "OK" to start exploring.


13.2 Connect NanoPC-T2 to CMOS 5M-Pixel Camera
For more details about the CAM500A camera refer to [1]
- If your NanoPC-T2 runs Android5.1 and it is connected to our LCD or an HDMI monitor after Android is fully loaded click on the "Camera" icon and the application will be started. You can take pictures or record videos

- Under Debian a camera utility "nanocams" is available for previewing 40 frames and picture taking. You can try it by following the commands below
sudo nanocams -p 1 -n 40 -c 4 -o IMG001.jpg
For more details about the usage of the nanocams run "nanocams -h". You can get its source code from our git hub:
git clone https://github.com/friendlyarm/nexell_linux_platform.git
- Under FriendlyCore (kernel 4.4), You can try it by following the commands below:
Enter the following command to preview the video:
gst-launch-1.0 -e v4l2src device=/dev/video6 ! video/x-raw,format=I420,framerate=30/1,width=1280,height=720 ! nxvideosink
Enter the following command to start recording (VPU hardware encoding):
gst-launch-1.0 -e v4l2src device=/dev/video6 ! video/x-raw,format=I420,framerate=30/1,width=1280,height=720 ! tee name=t t. \ ! queue ! nxvideosink t. ! queue ! nxvideoenc bitrate=12000000 ! mp4mux ! \ filesink location=result_720.mp4
13.3 Use OpenCV to Access USB Camera
- The full name of "OpenCV" is Open Source Computer Vision Library and it is a cross platform vision library.
- When the NanoPC-T2 runs Debian users can use OpenCV APIs to access a USB Camera device.
1. Here is a guideline on how to use OpenCV with C++ on the NanoPC-T2:
- Firstly you need to make sure your NanoPC-T2 is connected to the internet.Login to your NanoPC-T2 via a serial terminal or SSH. After login type in your username(root) and password(fa):
- Run the following commands:
apt-get update apt-get install libcv-dev libopencv-dev
2. Make sure your USB camera works with the NanoPC-T2. You can test your camera with NanoPC-T2's camera utility.
3. Check your camera device:
ls /dev/video*
- Note:in our test case video0 was the device name.
4. OpenCV's code sample(official code in C++) is under /home/fa/Documents/opencv-demo. Compile the code sample with the following commands:
cd /home/fa/Documents/opencv-demo make
After it is compiled successfully a "demo" executable will be generated
5. Connect NanoPC-T2 to USB Keyboard & Run the Following Command:
./demoopencv is successfully started
13.4 Connect NanoPC-T2 to Matrix GPS Module
- The Matrix-GPS module is a small GPS module with high performance. It can be used in navigation devices, four-axle drones and etc.
- The Matrix-GPS module uses serial communication. When the NanoPC-T2 is connected to the Matrix GPS module, after the NanoPC-T2 is powered up type in the following command in a terminal or click on the xgps icon it will be started.
$su - fa -c "DISPLAY=:0 xgps 127.0.0.1:9999"
- Or on the Debian GUI start the LXTerminal, type in "xgps" and enter it will be started too.
For more details about this GPS module refer to Click to check
Refer to the following diagram to connect the NanoPC-T2 to the Matrix-GPS:

Connection Details:
| Matrix-GPS | NanoPC-T2 |
| RXD | Pin11 |
| TXD | Pin12 |
| 5V | Pin29 |
| GND | Pin30 |
14 Access Hardware under Android
FriendlyElec developed a library called “libfriendlyarm-things.so”, for android developer to access the hardware resources on the development board in their android apps, the library is based on Android NDK.
Accessible Modules:
- Serial Port
- PWM
- EEPROM
- ADC
- LED
- LCD 1602 (I2C)
- OLED (SPI)
Interfaces & Ports:
- GPIO
- Serial Port
- I2C
- SPI
Refer to the following url for details:
- Homepage: http://wiki.friendlyelec.com/wiki/index.php/FriendlyThings
- Examples: https://github.com/friendlyarm/friendlythings-examples
- Guide to API: http://wiki.friendlyelec.com/wiki/index.php/FriendlyThings_APIs
15 Connect NanoPC-T2 to FriendlyARM LCD Modules
- Android
Here are the LCDs that are supported under Android:S430, S700/S701, S702, HD700, HD702, HD101 and X710 all of which are LCDs with capacitive touch.
- FriendlyCore & Lubuntu Desktop
Here are the LCDs that are supported under FriendlyCore and Lubuntu Desktop:S430, S700/S701, S702, HD700, HD702, HD101 and X710 all of which are LCDs with capacitive touch;
W35B, H43, P43, S70D and Matrix 2.8" SPI Key TFT LCD all of which are LCDs with resistive touch
All these LCD's tech details can be obtained on our wiki site:LCDModules
16 Schematics & Mechanical drawing
- Schematic(NanoPC-T2-T3-1711-Schematic.pdf)
- Schematic(NanoPC-T2_1601B_Schematic.pdf)
- PCB Dimension(NanoPC-T2-T3_1711_Draw_dxf.zip)
- PCB Dimension(NanoPC-T2-Dimensions(dxf))
- Component-Position-Diagram(Component-Position-Diagram)
- S5P4418 Datasheet (S5P4418_Datasheet_0.1.pdf)
17 Resources
- 《创客秘籍》Hacker's Book in Chinese by FriendlyARM
- 《创客秘籍-02》Hacker's Book-02 in Chinese by FriendlyARM
- 《创客秘籍-03》Hacker's Book-03 in Chinese by FriendlyARM
- SEC_Users_Manual_S5P4418_Users_Manual_Preliminary[2]
- eMMC eMMC5.0_1xnm_based_e_MMC
- Matrix Modules & Wiki Sites:
- Button
- LED
- A/D Converter
- Relay
- 3-Axis Digital Accelerometer
- 3-Axis Digital Compass
- Temperature Sensor
- Temperature & Humidity Sensor
- Buzzer
- Joystick
- I2C(PCF8574)+LCD1602
- Sound Sensor
- Ultrasonic Ranger
- GPS
- Matrix - Compact Kit
- Fire Sensor
- CAM500A Camera
- BAll Rolling Switch
- 2'8 SPI Key TFT 2.8" SPI LCD
- IR Counter
- IR Receiver
- L298N Motor Driver
- MQ-2 Gas Sensor
- MQ-3 Gas Sensor
- One_Touch_Sensor
- _Photoresistor
- _Potentiometer
- Pressure & Temperature Sensor
- RGB LED
- RTC
- Rotary Encoder
- Soil Moisture Sensor
- Thermistor
- USB WiFi
- Water Sensor
18 Source Code and Image Files Download Links
19 Tech Support
If you have any further questions please visit our forum http://www.friendlyarm.com/Forum/ and post a message or email us at techsupport@friendlyarm.com. We will endeavor to get back to you as soon as possible.
20 Update Log
20.1 2023-01-09
20.1.1 FriendlyCore:
- optimized the systemd service
20.2 2020-10-26
- FriendlyCore, Lubuntu:
Fix Bluetooth stability issue
20.3 2019-12-28
- eflasher:
1) Supports flashing only some files, such as updating only the kernel and uboot in emmc
2) Added gui option to disable overlay filesystem
3) Add command line parameters to achieve one-click installation without interaction
4) Fix the issue that the same mac address will appear on different devices after backup and restore image
5) UI interface can now be configured with title, hide interface menus and buttons
20.4 2019-11-26
- FriendlyCore:
Pre-installed OpenCV 4.1.2
20.5 2019-11-14
- Introducing a new system FriendlyWrt:
FriendlyWrt is a customized OpenWrt system developed by FriendlyElec. It is open source and suitable for applications in IoT, NAS etc.
Please refre: http://wiki.friendlyelec.com/wiki/index.php/How_to_Build_FriendlyWrt
- FriendlyCore, Lubuntu updated as follows:
1) Added support for new 4.3-inch screen YZ43
2) Compile bcmdhd as a module.
- Android7 update is as follows:
1) Added support for new 4.3-inch screen YZ43
2) Optimize the touch experience when using HD900 screen under Android 7 system
3) Optimize the touch experience when using S702 screen under Android 7 system
20.6 2019-10-18
- Android7, FriendlyCore, Lubuntu:
Fixed audio playback issue.
20.7 2019-09-30
- Android7 updated as follows:
1)Added support for Android hardware access library (named FriendlyThing), support access to hardware resources such as GPIO, PWM, RTC, serial port and watchdog, providing open source demo
2) Added support for camera CAM500B (OV5640)
3) Added support for LCD W500 (800x480)
4) Fixed LCD-S430 compatibility issues
- FriendlyCore, FriendlyDesktop updated as follows:
1) Kernel version updated to v4.4.172, same as Android 7
2) Added Docker support, support 32bit and 64bit file systems
3) Kernel configuration items are optimized to enable more features and device drivers
20.8 2019-07-18
- Introducing a new system Android 7.1.2
1) Features similar to the old version of Android 5, support 4G, WiFi, Ethernet, Bluetooth, etc.
2) Kernel version: 4.4.172
3) Known issue: The camera is not working yet
- Android/FriendlyCore/Lubuntu updated as follows:
1) Fix an issue where HD101B can't be touched in some cases
2) Fix GPIO configuration of Power key
3) Solve the problem of too small volume: the volume of the DAC is changed from -20dB to -6dB during playback.
4) Add more models of USB Wi-Fi support, built-in driver rtl8821CU.ko, rtl88XXau.ko
- Updates for Lubuntu only:
1) Modify Lubuntu's Power key behavior to (without pop-ups) shut down directly
2) Add script xrotate.sh to simplify screen rotation settings (Note: screen rotation will lose performance)
- The following updates are only available for NanoPC T2, Smart4418:
Support for reading Ethernet Mac addresses from the onboard EEPROM, only supports the following systems: FriendlyCore, Lubuntu, Android7
20.9 2019-06-25
Linux(Ubuntu 16.04/18.04) uses OverlayFS to enhance filesystem stability.
20.10 2019-06-03
1) Configure LED1 to be in heartbeat mode
2) Fix HDMI 1080P may have no display problem in some cases
3) Fix the issue that mysql cannot be installed under Linux
4) Fix the issue that the 1-wire touch resistance screen cannot be used under lubuntu
20.11 2019-01-24
1) Update uboot-v2014.07, uboot-v2016.01 for HD702V LCD
2) Adjust Qt5 font path
20.12 2018-12-17
- Android5 updated as follows:
1) Add support for 4G network, support module: Quectel EC20
2) Add audio setting UI, you can set the default output to headphones or HDMI
3) Synchronously turn off the backlight of the one-line touch screen when the system Shutdown
- FriendlyCore updated as follows:
1) Add OV5640 camera support
2) Update BL1 to improve system startup stability
- Lubuntu updated as follows:
1) Add Chrome-browser browser, support web page 1080P hardware decoding, support WebGL
2) Set the audio output channel to HDMI by default (can be changed via /etc/asound.conf)
3) Update BL1 to improve system startup stability
4) Fixed some issues regarding the package error in the previous version
5) Adjust DPMS settings, turn off automatic sleep by default
20.13 March-04-2016
- Released English version
20.14 March-09-2016
- Corrected a typo
20.15 March-23-2016
- Added section 11
20.16 March-27-2016
- Corrected expression errors
20.17 April-08-2016
- Added section 6.4.2 and 7.4
- Updated section 6.5
20.18 June-30-2016
- Added section 9 and 10
20.19 Sep-04-2016
- Updated section 5.2.2 and 10.1.1
20.20 Sep-27-2016
- Updated section 5.2.2, 7.5 and 8.2
20.21 Nov-2-2016
- Updated section 6.2, 6.3, 6.4 and 12
20.22 Nov-17-2016
- Added section 10.6
20.23 Dec-7-2016
- Added section 6.6
- Updated section 7.5
20.24 June-13-2016
- Added section 7: added UbuntuCore
- Added section 11.3: added DietPi
20.25 June-20-2016
- Updated sections 6.2 & 6.3: Wireless connection and WiFi AP setting
- Added section 3: software features