Difference between revisions of "NanoPi NEO Air/zh"
(→3D 打印外壳) |
(→3D 打印外壳) |
||
| Line 451: | Line 451: | ||
[[File:DSC 2338.jpg|frameless|300px|NanoPi NEO Air 3D printed housing]] <br> | [[File:DSC 2338.jpg|frameless|300px|NanoPi NEO Air 3D printed housing]] <br> | ||
[http://www.thingiverse.com/thing:1998968 NanoPi NEO Air V1.0 3D打印外壳下载链接]<br> | [http://www.thingiverse.com/thing:1998968 NanoPi NEO Air V1.0 3D打印外壳下载链接]<br> | ||
| − | [http: NanoPi NEO Air V1.1 3D打印外壳下载链接] | + | [http: NanoPi NEO Air V1.1 3D打印外壳下载链接]<br> |
==更多OS== | ==更多OS== | ||
Revision as of 06:26, 13 October 2017
Contents
1 介绍



NanoPi NEO Air(以下简称Air)是一款大小只有 40x40mm的开源无线创客板,它采用全志公司的H3四核A7主控,最高运行主频可达1.2Ghz, 管脚兼容NanoPi NEO(有线网版本,V 1.2),并兼容24pin树莓派GPIO。 配备512M DDR3内存,标配 8GB eMMC高速闪存,集成AP6212 WiFi蓝牙模块,支持microSD卡启动运行系统,并带有YUV422并行摄像头接口,最高可支持500W像素CMOS摄像传感器。 采用了更加专业的电源系统设计,采用6层板布线,具有良好的散热特性。
2 资源特性
- CPU: Allwinner H3, Quad-core Cortex-A7 Up to 1.2GHz
- RAM: 512MB DDR3 RAM
- Storage: 8GB eMMC
- WiFi: 802.11b/g/n
- Bluetooth: 4.0 dual mode
- DVP Camera: 0.5mm pitch 24 pin FPC seat
- MicroUSB: OTG and power input
- MicroSD Slot x 1
- Debug Serial Port: 4Pin,2.54mm pitch pin header
- GPIO1: 2.54mm spacing 24pin,It includes UART,SPI,I2C,GPIO
- GPIO2: 2.54mm spacing 12pin,It includes USBx2,IR,SPDIF,I2S
- PCB Size: 40 x 40mm
- PCB layer: 6
- Power Supply: DC 5V/2A
- Temperature measuring range: -40℃ to 80℃
- OS/Software: u-boot, Ubuntu-Core, eflasher
- Weight: 7.5g(WITHOUT Pin-headers)
3 接口布局和尺寸
3.1 接口布局

- GPIO管脚定义
Pin# Name Linux gpio Pin# Name Linux gpio 1 SYS_3.3V 2 VDD_5V 3 I2C0_SDA / GPIOA12 4 VDD_5V 5 I2C0_SCL / GPIOA11 6 GND 7 GPIOG11 203 8 UART1_TX / GPIOG6 198 9 GND 10 UART1_RX / GPIOG7 199 11 UART2_TX / GPIOA0 0 12 GPIOA6 6 13 UART2_RTS / GPIOA2 2 14 GND 15 UART2_CTS / GPIOA3 3 16 UART1_RTS / GPIOG8 200 17 SYS_3.3V 18 UART1_CTS / GPIOG9 201 19 SPI0_MOSI / GPIOC0 64 20 GND 21 SPI0_MISO / GPIOC1 65 22 UART2_RX / GPIOA1 1 23 SPI0_CLK / GPIOC2 66 24 SPI0_CS / GPIOC3 67
- USB/I2S/IR 定义
Pin# Name Description 1 VDD_5V 5V Power Out 2 USB-DP1 USB1 DP Signal 3 USB-DM1 USB1 DM Signal 4 USB-DP2 USB2 DP Signal 5 USB-DM2 USB2 DM Signal 6 GPIOL11/IR-RX GPIOL11 or IR Receive 7 SPDIF-OUT/GPIOA17 GPIOA17 or SPDIF-OUT 8 PCM0_SYNC/I2S0_LRC I2S/PCM Sample Rate Clock/Sync 9 PCM0_CLK/I2S0_BCK I2S/PCM Sample Rate Clock 10 PCM0_DOUT/I2S0_SDOUT I2S/PCM Serial Bata Output 11 PCM0_DIN/I2S0_SDIN I2S/PCM Serial Data Input 12 GND 0V
- Debug Port(UART0)
Pin# Name 1 GND 2 VDD_5V 3 UART_TXD0 / GPIOA4 4 UART_RXD0 / GPIOA5 / PWM0
- DVP Camera IF 管脚定义
Pin# Name Description 1, 2 SYS_3.3V 3.3V电源输出给外部摄像头模块 7,9,13,15,24 GND 参考地, 0V 3 I2C2_SCL I2C时钟信号 4 I2C2_SDA I2C数据信号 5 GPIOE15 普通GPIO, 施加给外部摄像头模块的控制信号 6 GPIOE14 普通GPIO, 施加给外部摄像头模块的控制信号 8 MCLK 提供给外部摄像头模块的时钟信号 10 NC 没有连接 11 VSYNC 外部摄像头模块输出给CPU的行信号 12 HREF/HSYNC 外部摄像头模块输出给CPU的场信号 14 PCLK 外部摄像头模块输出给CPU的像数点信号 16-23 Data bit7-0 数据信号
- 音频测试点
Pin# Name Description 1 MICP MICIN1P, Microphone Positive Input 2 MICN MICIN1N, Microphone Negative Input 3 LR LINEOUTR, LINE-OUT Right Channel Output 4 LL LINEOUTL, LINE-OUT Left Channel Output

- 说明
- SYS_3.3V: 3.3V电源输出
- VDD_5V: 5V电源输入/输出。当电压大于MicroUSB时,向板子供电,否则板子从MicroUSB取电。输入范围:4.7~5.6V
- 全部信号引脚均为3.3V电平,输出电流为5mA,可以带动小负荷模块,io都不能带负载
- 更详细的信息请查看原理图:NanoPi-NEO-Air-1608-Schematic.pdf
3.2 机械尺寸

4 快速入门
4.1 准备工作
要开启你的NanoPi NEO Air新玩具,请先准备好以下硬件
- NanoPi NEO Air主板
- microSD卡/TF卡: Class10或以上的 8GB SDHC卡
- 一个microUSB接口的外接电源,要求输出为5V/2A(可使用同规格的手机充电器)
- 一台电脑,需要联网,建议使用Ubuntu 14.04 64位系统
4.2 经测试使用的TF卡
制作启动NanoPi NEO Air的TF卡时,建议Class10或以上的 8GB SDHC卡。以下是经友善之臂测试验证过的高速TF卡:
- SanDisk闪迪 TF 8G Class10 Micro/SD 高速 TF卡:

- SanDisk闪迪 TF128G 至尊高速MicroSDXC TF 128G Class10 48MB/S:

- 川宇 8G手机内存卡 8GTF卡存储卡 C10高速class10 micro SD卡:

4.3 制作一张带运行系统的TF卡
4.3.1 下载系统固件
- 首先访问下载地址下载需要的固件文件(officail-ROMs目录)和烧写工具(tools目录):
使用以下固件: nanopi-neo-air_ubuntu-core-xenial_3.4.y_YYYYMMDD.img.zip Ubuntu-Core with Qt-Embedded系统固件,使用Linux-3.4.y内核 nanopi-neo-air_eflasher_3.4.y_YYYYMMDD.img.zip eflasher系统固件,使用Linux-3.4.y内核,用于烧写系统到eMMC nanopi-neo-air_ubuntu-core-xenial_4.x.y_YYYYMMDD.img.zip Ubuntu-Core with Qt-Embedded系统固件,使用Linux-4.x.y内核 nanopi-neo-air_debian-nas-jessie_4.x.y_YYYYMMDD.img.zip NAS系统固件,使用Linux-4.x.y内核,配合1-bay NAS Dock使用 nanopi-neo-air_ubuntu-oled_4.x.y_YYYYMMDD.img.zip OLED系统固件,使用Linux-4.x.y内核,配合NanoHat OLED使用 nanopi-neo-air_eflasher_4.x.y_YYYYMMDD.img.zip eflasher系统固件,使用Linux-4.x.y内核,用于烧写系统到eMMC 烧写工具: win32diskimager.rar Windows平台下的系统烧写工具,Linux平台下可以用dd命令烧写系统
4.3.2 Linux-3.4.y和Linux-4.x.y系统固件差异
- Linux-3.4.y内核为CPU芯片厂商全志科技官方提供的内核,全志为该内核做了十分多的定制开发,所以该内核完善度高但是不够纯净,对应的系统固件发热量较大;
- Linux-4.x.y内核仍在不断地完善中,并且尽可能地保持和Linus Torvalds主线内核一致,该内核拥有和主线内核一致的特性,是一个比较纯净的内核,对应的系统固件发热量较小。如果产品不需要使用VPU和GPU功能,可以使用该内核;
两者的具体差异如下:

4.3.3 TF卡启动系统
4.3.3.1 制作Ubuntu-Core with Qt-Embedded系统TF卡
- 将Ubuntu-Core系统固件和烧写工具win32diskimager.rar分别解压,在Windows下插入TF卡(限4G及以上的卡),以管理员身份运行 win32diskimager 工具,
在win32diskimager工具的界面上,选择你的TF卡盘符,选择系统固件,点击 Write 按钮烧写即可。
- 当制作完成TF卡后,拔出TF卡插入Air的BOOT卡槽,上电启动(注意,这里需要5V/2A的供电),你可以看到绿灯常亮以及蓝灯闪烁,这时你已经成功启动Ubuntu-Core系统。
注意: Debian/Ubuntu系列的ROM都可以使用上述方法制作TF系统启动卡。
4.3.4 烧写系统到eMMC
- 将eflasher系统固件和烧写工具win32diskimager.rar分别解压,在Windows下插入TF卡(限8G及以上的卡),以管理员身份运行 win32diskimager 工具,
在win32diskimager工具的界面上,选择你的TF卡盘符,选择系统固件,点击 Write 按钮烧写即可。
- 当制作完成TF卡后,拔出TF卡插入Air的BOOT卡槽,上电启动(注意,这里需要5V/2A的供电),你可以看到绿灯常亮以及蓝灯闪烁,这时你已经成功启动eflasher系统。
- 在命令行终端中通过执行下列命令进行烧写:
$ su root
$ eflasherroot用户的密码是fa,输入数字并回车选择想要安装到eMMC的系统,然后输入yes并回车确定开始烧写:

等待烧写完毕后,断电并从BOOT卡槽中取出TF卡,此时再上电就会从eMMC启动系统了。
5 Ubuntu-Core with Qt-Embedded系统的使用
5.1 运行Ubuntu-Core with Qt-Embedded
- 当成功在TF卡/eMMC中安装Ubuntu-Core系统后,连接电源(5V 2A),可以看到板上的蓝色LED闪烁,这说明系统已经开始启动了。

- 如果您需要进行内核开发,你最好选购一个串口配件,连接了串口,则可以通过终端对Air进行操作。
- 以下是串口的接法,接上串口,即可调试。接上串口后你可以选择从串口模块的DC口或者从Air的MicroUSB口进行供电:

- Ubuntu-Core默认帐户:
普通用户:
用户名: pi 密码: pi
Root用户:
用户名: root 密码: fa
默认会以 pi 用户自动登录,你可以使用 sudo npi-config 命令取消自动登录。
- 更新软件包:
$ apt-get update
5.2 扩展TF卡文件系统
第一次启动系统时,系统会自动扩展文件系统分区,请耐心等待,TF卡/eMMC的容量越大,需要等待的时间越长,进入系统后执行下列命令查看文件系统分区大小:
$ df -h
5.3 连接无线网络
Air使用无线网络或者蓝牙的时候,需要接上天线使用。以下是Air连接使用IPX天线的图片。

Ubuntu 使用 NetworkManager 工具来管理网络,其在命令行下对应的命令是 nmcli,要连接WiFi,相关的命令如下:
- 查看网络设备列表
$ sudo nmcli dev
注意,如果列出的设备状态是 unmanaged 的,说明网络设备不受NetworkManager管理,你需要清空 /etc/network/interfaces下的网络设置,然后重启.
- 开启WiFi
$ sudo nmcli r wifi on
- 扫描附近的 WiFi 热点
$ sudo nmcli dev wifi
- 连接到指定的 WiFi 热点
$ sudo nmcli dev wifi connect "SSID" password "PASSWORD"
请将 SSID和 PASSWORD 替换成实际的 WiFi名称和密码。
连接成功后,下次开机,WiFi 也会自动连接。
更详细的NetworkManager使用指南可参考这篇文章: NetworkManager
5.4 SSH登录
如果你没有串口模块,可以通过SSH协议登录Air。假设你已经通过串口模块或者路由器查看到Air的IP地址为192.168.1.230,在PC机上执行以下命令登录Air:
$ ssh root@192.168.1.230
密码为fa。
5.5 命令行查看CPU工作温度
在命令行终端执行如下命令,可以快速地获取CPU的当前温度和运行频率等信息:
$ cpu_freq5.6 通过Rpi-Monitor查看系统状态
Ubuntu-Core系统里已经集成了Rpi-Monitor,该服务允许用户在通过浏览器查看开发板系统状态。
假设Air的IP地址为192.168.1.230,在PC的浏览器中输入下述地址:
192.168.1.230:8888可以进入如下页面:

用户可以非常方便地查看到系统负载、CPU的频率和温度、可用内存、SD卡容量等信息。
5.7 连接DVP摄像头模块(CAM500B)
注意: 该功能仅支持使用Linux-3.4.y的系统固件。
CAM500B是一款500万像素摄像头模块,以DVP并行信号输出,详细信息请参考Matirx-CAM500B。

启动系统,连接网络,以root用户登录终端并编译运行mjpg-streamer:
$ cd /root/mjpg-streamer $ make $ ./start.sh
mjpg-streamer是一个开源的网络视频流服务器,在板子上成功运行mjpg-streamer后会打印下列信息:
i: Using V4L2 device.: /dev/video0 i: Desired Resolution: 1280 x 720 i: Frames Per Second.: 30 i: Format............: YUV i: JPEG Quality......: 90 o: www-folder-path...: ./www/ o: HTTP TCP port.....: 8080 o: username:password.: disabled o: commands..........: enabled
假设Air的IP地址为192.168.1.230,在PC的浏览器中输入 192.168.1.230:8080 就能浏览摄像头采集的画面了,建议使用Chrome浏览器,效果如下:

mjpg-streamer是用libjpeg对摄像头数据进行软编码,你可以使用ffmpeg对摄像头数据进行硬编码,这样能大大降低CPU的占用率并提高编码速度:
$ ffmpeg -t 30 -f v4l2 -channel 0 -video_size 1280x720 -i /dev/video0 -pix_fmt nv12 -r 30 -b:v 64k -c:v cedrus264 test.mp4
默认会录制30秒的视频,输入q能终止录制。录制完成后会在当前目录生成一个名为test.mp4的视频文件,可将其拷贝到PC上进行播放验证。
5.8 测试蓝牙
安装相关的软件包:
$ apt-get install bluetooth bluez obexftp openobex-apps python-gobject ussp-push time bc
打开Android手机上的蓝牙功能,这里使用的测试机器为Samsung Galaxy A7。为Air接上外置天线后在Air上执行下列命令搜索附近的蓝牙设备:
$ hcitool scan可以搜索到Samsung Samsung Galaxy A7,并得到它的设备地址为"50:C8:E5:A7:31:D2",假设当前目录下有1个图片文件test.jpg,使用下列命令将test.jpg发送到A7上:
$ bt_send_file.sh -a 50:C8:E5:A7:31:D2 -f test.jpg
这时手机上会弹出文件传输的窗口,点击"接受"后会开始传输文件,传输完成后,Air串口上的打印信息如下:
name=test.jpg, size=2215936 Local device A1:A3:C1:79:66:6E Remote device 50:C8:E5:A7:31:D2 (12) Connection established send 2164K finish, speed=5.6 K/s
在手机上能成功查看到图片文件,则说明传输文件成功。
5.9 使用npi-config配置系统
npi-config是一个命令行下的系统配置工具,可以对系统进行一些初始化的配置,可配置的项目包括:用户密码、系统语言、时区、Hostname、SSH开关、自动登录选项、硬件接口(Serial/I2C/SPI/PWM)使能等,在命令行执行以下命令即可进入:
$ sudo npi-config
npi-config的显示界面如下:

详细使用方法请参考:npi-config
6 如何编译Ubuntu-Core with Qt-Embedded系统
6.1 使用开源社区主线BSP
NEO Air支持使用Linux-4.x.y内核,并使用Ubuntu Core 16.04,关于H3芯片系列开发板使用主线U-boot和Linux-4.x.y的方法,请参考维基:Mainline U-boot & Linux
6.2 使用全志原厂BSP
6.2.1 准备工作
访问此处下载地址的sources/nanopi-h3-bsp目录,下载所有压缩文件,使用7-Zip工具解压后得到lichee目录和android目录,请务必保证这2个目录位于同一个目录中,如下:
$ ls ./ android lichee
也可以从github上克隆lichee源码:
$ git clone https://github.com/friendlyarm/h3_lichee.git lichee
注:lichee是全志为其CPU的板级支持包所起的项目名称,里面包含了U-boot,Linux等源码和众多的编译脚本。
6.2.2 安装交叉编译器
访问此处下载地址的toolchain目录,下载交叉编译器gcc-linaro-arm.tar.xz,将该压缩包放置在lichee/brandy/toochain/目录下即可,无需解压。
6.2.3 编译lichee源码
编译全志 H3 的BSP源码包必须使用64bit的Linux PC系统,并安装下列软件包,下列操作均基于Ubuntu-14.04 LTS-64bit:
$ sudo apt-get install gawk git gnupg flex bison gperf build-essential \ zip curl libc6-dev libncurses5-dev:i386 x11proto-core-dev \ libx11-dev:i386 libreadline6-dev:i386 libgl1-mesa-glx:i386 \ libgl1-mesa-dev g++-multilib mingw32 tofrodos \ python-markdown libxml2-utils xsltproc zlib1g-dev:i386
编译lichee源码包,执行命令:
$ cd lichee/fa_tools $ ./build.sh -b nanopi-air -p linux -t all
该命令会一次性编译好U-boot、Linux内核和模块。
lichee目录里内置了交叉编译器,当进行源码编译时,会自动使用该内置的编译器,所以无需手动安装编译器。
下列命令可以更新TF卡上的U-boot:
$ cd lichee/fa_tools/ $ ./fuse.sh -d /dev/sdX -p linux -t u-boot
/dev/sdX请替换为实际的TF卡设备文件名。
内核boot.img和驱动模块均位于linux-3.4/output目录下,将boot.img拷贝到TF卡的boot分区的根目录即可更新内核。
6.2.4 编译U-boot
注意: 必须先完整地编译整个lichee目录后,才能进行单独编译U-boot的操作。
如果你想单独编译U-boot,可以执行命令:
$ cd lichee/fa_tools/ $ ./build.sh -b nanopi-air -p linux -t u-boot
下列命令可以更新TF卡上的U-boot:
$ cd lichee/fa_tools/ $ ./fuse.sh -d /dev/sdX -p linux -t u-boot
/dev/sdX请替换为实际的TF卡设备文件名。
6.2.5 编译Linux内核
注意: 必须先完整地编译整个lichee目录后,才能进行单独编译Linux内核的操作。
如果你想单独编译Linux内核,可以执行命令:
$ cd lichee/fa_tools/ $ ./build.sh -b nanopi-air -p linux -t kernel
编译完成后内核boot.img和驱动模块均位于linux-3.4/output目录下,将boot.img拷贝到TF卡的boot分区的根目录即可。
6.2.6 清理lichee源码
$ cd lichee/fa_tools/ $ ./build.sh -b nanopi-air -p linux -t clean
7 3D 打印外壳

NanoPi NEO Air V1.0 3D打印外壳下载链接
[http: NanoPi NEO Air V1.1 3D打印外壳下载链接]
8 更多OS
8.1 DietPi_NanoPiNEOAir-armv7-(Jessie)
DietPi身轻如燕,镜像文件最小只有400M 字节(只是Raspbian Lite的三分之一)。系统存储操作及进程对资源的占用非常少,并且预装DietPi-RAMlog工具。这些特性使得用户能最大程度地发挥设备本身的性能。
仅提供给进阶爱好者交流使用,不对该系统提供专业技术支持。
烧写步骤:
- 下载系统固件DietPi_NanoPiNEOAir-armv7-(Jessie)点击下载DietPi_NanoPiNEOAir-armv7-(Jessie)
- 将文件解压后得到系统固件,在Windows下使用友善官方提供 win32diskimager 工具烧写即可。
- 烧写完成后,将TF卡插入NanoPi NEO Air,上电即可体验DietPi_NanoPiNEOAir-armv7-(Jessie)。
登录账号:root; 登录密码:dietpi
9 资源链接
9.1 手册原理图等开发资料
- 原理图
- 尺寸图
- H3 Datesheet Allwinner_H3_Datasheet_V1.2.pdf
9.2 开发文档及教程
9.2.1 使用Python操作硬件模块开发教程及代码
可以和BakeBit - NEO Hub连接使用的模块如下:
- 1、按键模块
- 2、蜂鸣器模块
- 3、绿色LED模块
- 4、摇杆模块
- 5、LED Bar模块
- 6、光敏模块
- 7、OLED模块
- 8、红色LED模块
- 9、旋转角度模块
- 10、舵机模块
- 11、声音模块
- 12、超声波模块
9.2.2 使用C语言操作硬件模块开发教程及代码
- NanoPi NEO创客秘籍-01
- 按键模块
- LED模块
- 模数转换
- 继电器模块
- 三轴重力加速度模块
- 三轴数字指南针模块
- 温度传感器模块
- 温湿度传感器模块
- 蜂鸣器
- 摇杆模块(Joystick)
- I2C(PCF8574)+LCD1602
- 声音传感器
- 超声波模块
- GPS模块
- 迷你扩展板Matrix - Compact Kit
- 火焰传感器
- CAM500 500万像素摄像头
- 滚珠开关模块
- 2'8 SPI Key TFT 2.8寸spi液晶屏
- 红外计数模块
- 红外接收模块
- 电机驱动器模块
- MQ-2 烟雾传感器模块
- MQ-3 气体传感器
- 单点电容式数字触摸传感器模块
- 光敏电阻模块
- 电位器模块
- 压力传感器模块
- RGB LED
- RTC模块
- Rotary Encoder
- 土壤湿度检测传感器模块
- 热敏电阻模块
- USB WiFi
- 水位/水滴识别检测传感器模块
10 硬件更新
- NanoPi NEO Air Version Compare & List(Hardware)
version NanoPi NEO V1.0 NanoPi NEO V1.1 Photo TF卡座型号 ① Air V1.1相对于V1.0更改了TF卡座型号 ,TF卡位置向AP6212方向偏移了约1mm Audio 接口 ②Air v1.0的音频接口为4个焊点,如下图所示 
② Air v1.1的音频接口为4Pin 2.54mm排针,如下图所示 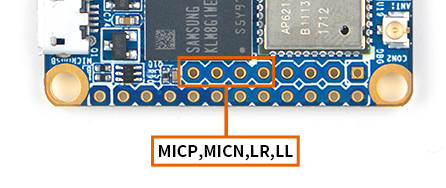
LED指示灯颜色 ③ Air v1.0 LED指示灯颜色为:PWR--绿色,STAT--蓝色 ③ Air v1.1 LED指示灯颜色为:PWR--红色,STAT--绿色



11 软件更新日志
11.1 2017-07-05
nanopi-neo-air_ubuntu-core-xenial_4.11.2_20170705:
nanopi-neo-air_ubuntu-oled_4.11.2_20170705:
nanopi-neo-air_debian-nas-jessie_4.11.2_20170705:
- Linux-4.x主线内核支持I2S0和NanoHat PCM5102A;
- Linux-4.x主线内核支持Matrix-2'8_SPI_Key_TFT;
- 优化内存使用策略,提升系统稳定性;
11.2 2017-06-08
- 添加Linux-3.4.y和Linux-4.x.y系统固件差异的说明
- 简化全志原厂BSP的编译操作;
11.3 2017-05-31
nanopi-neo-air_debian-nas-jessie_4.11.2_20170531:
nanopi-neo-air_eflasher_4.11.2_20170531:
nanopi-neo-air_ubuntu-core-xenial_4.11.2_20170531:
nanopi-neo-air_ubuntu-oled_4.11.2_20170531:
- 升级U-boot版本到2017.05;
- 升级Linux内核版本到4.11.2;
11.4 2017-05-24
nanopi-neo-air_ubuntu-core-xenial_3.x.y_YYYYMMDD:
- 增加系统启动欢迎界面;
- 增加npi-config;
- 修改WiFi连接的管理方式;
nanopi-neo-air_ubuntu-core-xenial_4.x.y_YYYYMMDD:
- 首次发布基于Linux-4.x.y内核的ubuntu-core系统;
nanopi-neo-air_eflasher_4.x.y_YYYYMMDD:
- 首次发布基于Linux-4.x.y内核的eflasher系统;
nanopi-neo-air_ubuntu-oled_4.x.y_YYYYMMDD:
- 首次发布基于Linux-4.x.y内核的OLED系统;
11.5 2017-04-18
Ubuntu-Core系统更新如下:
- 修改了登录欢迎界面,当用户登录时会打印系统的基本状态信息;
- 增加 npi-config 工具,npi-config是一个命令行下的系统配置工具,可以对系统进行一些初始化的配置,可配置的项目包括:用户密码、系统语言、时区、Hostname、SSH开关、自动登录选项等,在命令行执行以下 sudo npi-config 即可进入;
- 预装NetworkManager作为网络管理工具;
- 新增pi用户,并配置为自动登录,自动登录特性可以使用npi-config工具配置;
11.6 2017-02-20
- Ubuntu-Core系统添加了nano编辑器;
- Ubuntu-Core系统解决了sudo命令提示“unable to resolve host FriendlyARM”的问题;
- Ubuntu-Core系统将fa用户添加到sudoers中;
11.7 2017-01-22
- 将Ubuntu-Core系统的版本号从15.10升级到16.04;
- 将H3 BSP代码分为lichee和android两部分,并精简lichee目录;
- 更新H3 BSP里的交叉编译器,解决该编译器无法编译应用程序的问题;
- Ubuntu-Core系统支持第一次开机自动扩展文件系统,并且支持开机修复文件系统;
- 支持使用fastboot更新U-boot;
- 更新eflasher系统,支持命令行烧写系统到eMMC;
11.8 2016-12-13
- 更新Ubuntu-Core系统固件
1) 增加Rpi-monitor服务,用于通过浏览器查看Air的状态;
2) 支持声卡配件NanoHat-PCM5102A;
3) 添加通过蓝牙发送文件的脚本;