Difference between revisions of "NanoPC-T2/zh"
(updated by API) |
|||
| (248 intermediate revisions by 5 users not shown) | |||
| Line 1: | Line 1: | ||
[[NanoPC-T2|English]] | [[NanoPC-T2|English]] | ||
==介绍== | ==介绍== | ||
| − | [[File:NanoPC-T2- | + | [[File:NanoPC-T2-1B.jpg|thumb|Overview]] |
| − | [[File:NanoPC-T2- | + | [[File:NanoPC-T2-A1.jpg|thumb|Front]] |
| − | [[File:NanoPC-T2- | + | [[File:NanoPC-T2-B1.jpg|thumb|Back]] |
* NanoPC-T2是友善之臂专门针对企业用户而设计,它采用三星四核Cortex -A9架构的S5P4418处理器,动态运行主频400M-1.4GHz,与友善已出的NanoPi 2 和 NanoPi 2 Fire相比,NanoPC-T2配备了8GB的eMMC、音频接口、视频输入/输出接口等;与此前的NanoPC-T1相比,不仅T2的标准接口和布局和NanoPC-T1完全相同,还集成了WiFi和蓝牙,并增加千兆以太网和电源管理功能。为适应工业客户需要,NanoPC-T2加装了标配的散热片,解决了长期困扰客户的4418芯片发热问题。 | * NanoPC-T2是友善之臂专门针对企业用户而设计,它采用三星四核Cortex -A9架构的S5P4418处理器,动态运行主频400M-1.4GHz,与友善已出的NanoPi 2 和 NanoPi 2 Fire相比,NanoPC-T2配备了8GB的eMMC、音频接口、视频输入/输出接口等;与此前的NanoPC-T1相比,不仅T2的标准接口和布局和NanoPC-T1完全相同,还集成了WiFi和蓝牙,并增加千兆以太网和电源管理功能。为适应工业客户需要,NanoPC-T2加装了标配的散热片,解决了长期困扰客户的4418芯片发热问题。 | ||
* T2几乎是同类尺寸板卡中接口最为丰富的微型嵌入式主板,并配备更加丰富的视频输出接口,支持HDMI 1080P完美输出,不仅支持各类流行的显示设备,更完美适配友善之臂出品的各类电容和电阻屏。 | * T2几乎是同类尺寸板卡中接口最为丰富的微型嵌入式主板,并配备更加丰富的视频输出接口,支持HDMI 1080P完美输出,不仅支持各类流行的显示设备,更完美适配友善之臂出品的各类电容和电阻屏。 | ||
| Line 10: | Line 10: | ||
==资源特性== | ==资源特性== | ||
* CPU: S5P4418, 动态运行主频400Mhz--1.4GHz | * CPU: S5P4418, 动态运行主频400Mhz--1.4GHz | ||
| − | * | + | * 电源管理: 采用一颗ARM® Cortex®-M0单片机做电源管理, 支持动态调压, 软件关机和定时开机等功能 |
* DDR3 RAM: 1GB | * DDR3 RAM: 1GB | ||
| + | * SD: 标准SD卡槽一个 | ||
* 网口: 千兆以太网接口(RTL8211E) | * 网口: 千兆以太网接口(RTL8211E) | ||
* Wireless:802.11 b/g/n | * Wireless:802.11 b/g/n | ||
| Line 21: | Line 22: | ||
* 音频:3.5mm耳机座/Via HDMI | * 音频:3.5mm耳机座/Via HDMI | ||
* 麦克风: 板载麦克风 | * 麦克风: 板载麦克风 | ||
| − | * USB | + | * USB Host: 4 x USB 2.0 Host , 其中两个是标准A型接口, 另外两个是2.54mm排针 |
* Micro USB: 1 x USB 2.0 Client | * Micro USB: 1 x USB 2.0 Client | ||
* LCD接口: 45pin, 0.5mm间距FPC贴片座,支持全彩TFT LCD (RGB:8-8-8) | * LCD接口: 45pin, 0.5mm间距FPC贴片座,支持全彩TFT LCD (RGB:8-8-8) | ||
| Line 28: | Line 29: | ||
* GPIO扩展接口: 30 Pin2.54mm排针, 包含3个UART, 1路I2C, 1路SPI, 3路PWM,11个GPIO | * GPIO扩展接口: 30 Pin2.54mm排针, 包含3个UART, 1路I2C, 1路SPI, 3路PWM,11个GPIO | ||
* 调试串口:4Pin,2.5mm间距白色座子 | * 调试串口:4Pin,2.5mm间距白色座子 | ||
| − | * | + | * 按键:K1(电源按键),Reset |
* LED:一个电源指示LED, 两个GPIO控制的LED | * LED:一个电源指示LED, 两个GPIO控制的LED | ||
| − | * 其他: | + | * 其他: K1(电源按键),Reset, GPIO控制的LED均通过2.54mm排针引出, 板载温控电阻 |
* RTC: 支持RTC, 板上有备份电池接口 | * RTC: 支持RTC, 板上有备份电池接口 | ||
* PCB Size:100 x 60mm,6层,沉金工艺 | * PCB Size:100 x 60mm,6层,沉金工艺 | ||
* 散热片螺丝孔:能加螺丝固定的散热片 | * 散热片螺丝孔:能加螺丝固定的散热片 | ||
* 供电: DC 5V/2A | * 供电: DC 5V/2A | ||
| − | * OS/Software: u-boot, Android5.1, Debian8 | + | * 温度工作范围:零下30摄氏度到70摄氏度 |
| + | * OS/Software: u-boot, Android5.1, Debian8, Android4.4 | ||
==接口布局和尺寸== | ==接口布局和尺寸== | ||
===接口布局=== | ===接口布局=== | ||
| − | [[File:NanoPC-T2 | + | [[File:NanoPC-T2-IF.png |thumb|600px|NanoPC-T2接口布局]] |
* '''30Pin GPIO管脚定义''' | * '''30Pin GPIO管脚定义''' | ||
| Line 148: | Line 150: | ||
|30 || GPIOB25 || 普通GPIO, 用户可控制 | |30 || GPIOB25 || 普通GPIO, 用户可控制 | ||
|- | |- | ||
| − | |31 || GPIOC15 || 一线协议信号, 以实现LCD型号识别, 背光控制和电阻触摸的功能. 系统已占用, 用户不可重新设置. | + | |31 || GPIOC15 || 一线协议信号, 以实现LCD型号识别, <br> |
| + | 背光控制和电阻触摸的功能. 系统已占用, 用户不可重新设置. | ||
|- | |- | ||
|32 || XnRSTOUT Form CPU || 系统复位时向外输出低电平 | |32 || XnRSTOUT Form CPU || 系统复位时向外输出低电平 | ||
| Line 290: | Line 293: | ||
|30 || DGND | |30 || DGND | ||
|} | |} | ||
| + | :'''说明''' | ||
| + | ::#SYS_3.3V: 3.3V电源输出 | ||
| + | ::#VDD_5V: 5V电源输出 | ||
| + | ::#更详细的信息请查看原理图:[http://wiki.friendlyelec.com/wiki/images/d/d0/NanoPC-T3_Plus_1709-Schematic.pdf NanoPC-T2_1711_Schematic.pdf] | ||
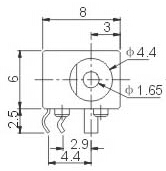
===机械尺寸=== | ===机械尺寸=== | ||
| − | [[File:NanoPC- | + | [[File:NanoPC-T2-T3-1603-Dimensions.png|frameless|800px|NanoPC-T2 Dimensions]] |
| − | ::详细尺寸:[http://wiki. | + | ::详细尺寸:[http://wiki.friendlyelec.com/wiki/images/2/24/NanoPC-T2-T3-1603-Dimensions%28dxf%29.zip NanoPC-T2-Dimensions(dxf)] |
| + | |||
| + | *'''电源接口''' | ||
| + | ::*DC电源座子, 适合DC4.0*1.7mm电源插头, 电压范围:4.7~5.6V | ||
| + | ::[[File:DC-023.png]] | ||
| + | |||
| + | ==硬件设计注意事项== | ||
| + | ===EEPROM=== | ||
| + | *因为板上的集成了带MAC地址的EEPROM, 型号为24AA025E48T-I/OT, 接在I2C0上, 设备地址为0x51, 所以有些型号的EEPROM不能接在I2C0上, 否则会地址冲突. | ||
| + | *不能接在I2C0上的EEPROM: 24C04, 24C08, 24C16, 可以接在I2C0上的EEPROM:24C01, 24C02, 24C256 | ||
| + | *关于EEPROM地址问题, 请看 http://www.onsemi.com/pub_link/Collateral/CAT24C01-D.PDF | ||
==快速入门== | ==快速入门== | ||
===准备工作=== | ===准备工作=== | ||
| − | + | 要开启你的NanoPC-T2新玩具,刷机前请先准备好以下硬件 | |
* NanoPC-T2主板 | * NanoPC-T2主板 | ||
* 大SD卡/: Class10或以上的 8GB SDHC卡 | * 大SD卡/: Class10或以上的 8GB SDHC卡 | ||
| Line 304: | Line 321: | ||
* 一台支持HDMI输入的显示器或者电视(或选购LCD配件) | * 一台支持HDMI输入的显示器或者电视(或选购LCD配件) | ||
* 一套USB键盘鼠标,同时连接还需要USB HUB (或选购串口转接板,要PC上进行操作) | * 一套USB键盘鼠标,同时连接还需要USB HUB (或选购串口转接板,要PC上进行操作) | ||
| − | * 一台电脑,需要联网,建议使用Ubuntu | + | * 一台电脑,需要联网,建议使用Ubuntu 18.04 64位系统 |
| − | + | {{S5P4418BootFromSDCard/zh|NanoPC-T2}} | |
| − | + | {{BurnOSToEMMC/zh|NanoPC-T2|s5p4418-eflasher}} | |
| − | + | {{S5PXX18MakeSDCardViaSDFusing/zh|NanoPC-T2|sd-fuse_s5p4418}} | |
| − | + | {{ResizeTFCardFS/zh|NanoPC-T2}} | |
| − | + | {{S5Pxx18HDMI/zh|NanoPC-T2|arch/arm/plat-s5p4418/nanopi2/lcds.c}} | |
| − | + | {{S5Pxx18MofidyKernelCommandLineOnHostPC/zh|NanoPC-T2|sd-fuse_s5p4418}} | |
| − | |- | + | {{NanoPCStartToUse/zh|NanoPC-T2}} |
| − | | | + | {{FriendlyCoreGeneral/zh|NanoPC-T2}} |
| − | |- | + | {{FriendlyCoreRunX11Application/zh|NanoPC-T2}} |
| − | | | + | {{FriendlyCoreS5Pxx18/zh|NanoPC-T2}} |
| − | |- | + | {{UbuntuXenial-Armhf-Install-Docker/zh|NanoPC-T2}} |
| − | | | + | {{S5Pxx18Android/zh|NanoPC-T2}} |
| − | |- | + | {{MoreOS/zh}} |
| − | | | + | {{S5P4418BuildFromSource/zh|NanoPC-T2}} |
| − | |- | + | {{S5P4418-KernelHeaderFile/zh|NanoPC-T2}} |
| − | | | + | {{S5Pxx18ExternalModules/zh|NanoPC-T2}} |
| − | |- | + | {{S5Pxx18AccessHWUnderAndroid/zh|NanoPC-T2}} |
| − | |} | + | {{S5Pxx18ConnectToLCDModules/zh|NanoPC-T2}} |
| − | + | {{S5Pxx18HWfiles/zh|NanoPC-T2}} | |
| − | + | {{S5P4418Resources/zh|NanoPC-T2}} | |
| − | + | {{DownloadUrl/zh|NanoPC-T2}} | |
| − | + | {{TechSupport/zh|NanoPC-T2}} | |
| − | + | {{S5P4418ChangeLog/zh}} | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
Latest revision as of 08:14, 3 July 2024
Contents
- 1 介绍
- 2 资源特性
- 3 接口布局和尺寸
- 4 硬件设计注意事项
- 5 快速入门
- 6 FriendlyCore的使用
- 6.1 介绍
- 6.2 运行FriendlyCore
- 6.3 开发Qt应用
- 6.4 开机自动运行Qt示例程序
- 6.5 扩展TF卡文件系统
- 6.6 使用蓝牙传输文件
- 6.7 连接WiFi
- 6.8 配置Wi-Fi无线热点
- 6.9 使用蓝牙
- 6.10 连接以太网
- 6.11 定制命令行的欢迎信息(文字LOGO)
- 6.12 修改时区
- 6.13 选择系统默认的音频设备
- 6.14 运行X11程序
- 6.15 运行 Qt 5.10.0 演示程序
- 6.16 运行 Qt5-OpenGL示例
- 6.17 硬解播放高清视频
- 6.18 连接DVP摄像头模块(CAM500B)
- 6.19 电源管理: 关机和定时开机
- 6.20 安装与使用 OpenCV 4.1.2
- 6.21 安装与使用 Caffe
- 6.22 Docker在armhf系统下的安装与使用
- 7 Android系统的使用
- 8 更多OS
- 9 如何编译系统
- 10 编译内核头文件安装包
- 11 扩展连接
- 12 在Android下访问硬件资源
- 13 支持LCD型号
- 14 原理图,Datasheet和尺寸图
- 15 资源链接
- 16 源代码和烧写文件的下载地址
- 17 技术支持
- 18 更新日志
- 18.1 日期 2023-01-09
- 18.2 日期 2020-10-26
- 18.3 日期 2019-12-28
- 18.4 日期 2019-11-26
- 18.5 日期 2019-11-14
- 18.6 日期 2019-10-18
- 18.7 日期 2019-09-30
- 18.8 日期 2019-07-18
- 18.9 日期 2019-06-25
- 18.10 日期 2019-06-03
- 18.11 日期 2019-01-24
- 18.12 日期 2018-12-17
- 18.13 日期 2018-09-06
- 18.14 日期 2018-08-11
- 18.15 日期 2018-03-24
- 18.16 日期 2017-06-13
- 18.17 日期 2017-04-18
- 18.18 日期 2017-03-08
- 18.19 日期 2017-02-09
- 18.20 日期 2016-11-17
- 18.21 日期 2016-09-02
- 18.22 日期 2016-08-20
- 18.23 日期 2016-07-01
- 18.24 日期 2016-05-21
- 18.25 日期 2016-04-19
- 18.26 日期 2016-04-01
- 18.27 日期 2016-02-29
- 18.28 日期 2015-12-01
1 介绍



- NanoPC-T2是友善之臂专门针对企业用户而设计,它采用三星四核Cortex -A9架构的S5P4418处理器,动态运行主频400M-1.4GHz,与友善已出的NanoPi 2 和 NanoPi 2 Fire相比,NanoPC-T2配备了8GB的eMMC、音频接口、视频输入/输出接口等;与此前的NanoPC-T1相比,不仅T2的标准接口和布局和NanoPC-T1完全相同,还集成了WiFi和蓝牙,并增加千兆以太网和电源管理功能。为适应工业客户需要,NanoPC-T2加装了标配的散热片,解决了长期困扰客户的4418芯片发热问题。
- T2几乎是同类尺寸板卡中接口最为丰富的微型嵌入式主板,并配备更加丰富的视频输出接口,支持HDMI 1080P完美输出,不仅支持各类流行的显示设备,更完美适配友善之臂出品的各类电容和电阻屏。
- NanoPC-T2是友善之臂出品的目前基于三星4418芯片最完备的工业级和商业级产品方案。
2 资源特性
- CPU: S5P4418, 动态运行主频400Mhz--1.4GHz
- 电源管理: 采用一颗ARM® Cortex®-M0单片机做电源管理, 支持动态调压, 软件关机和定时开机等功能
- DDR3 RAM: 1GB
- SD: 标准SD卡槽一个
- 网口: 千兆以太网接口(RTL8211E)
- Wireless:802.11 b/g/n
- Bluetooth:4.0 dual mode
- 天线: Wi-Fi和蓝牙共用, 板载陶瓷天线, 同时提供IPX接口
- eMMC:8GB
- 视频输入:DVP Camera/MIPI-CSI(双摄像头口)
- 视频输出:HDMI/LVDS/并行RGB-LCD/MIPI-DSI(四个视频输出接口)
- 音频:3.5mm耳机座/Via HDMI
- 麦克风: 板载麦克风
- USB Host: 4 x USB 2.0 Host , 其中两个是标准A型接口, 另外两个是2.54mm排针
- Micro USB: 1 x USB 2.0 Client
- LCD接口: 45pin, 0.5mm间距FPC贴片座,支持全彩TFT LCD (RGB:8-8-8)
- HDMI: HDMI 1.4a, Type A型口,1080P高清显示
- DVP Camera接口: 24pin, 0.5mm间距,FPC贴片竖座
- GPIO扩展接口: 30 Pin2.54mm排针, 包含3个UART, 1路I2C, 1路SPI, 3路PWM,11个GPIO
- 调试串口:4Pin,2.5mm间距白色座子
- 按键:K1(电源按键),Reset
- LED:一个电源指示LED, 两个GPIO控制的LED
- 其他: K1(电源按键),Reset, GPIO控制的LED均通过2.54mm排针引出, 板载温控电阻
- RTC: 支持RTC, 板上有备份电池接口
- PCB Size:100 x 60mm,6层,沉金工艺
- 散热片螺丝孔:能加螺丝固定的散热片
- 供电: DC 5V/2A
- 温度工作范围:零下30摄氏度到70摄氏度
- OS/Software: u-boot, Android5.1, Debian8, Android4.4
3 接口布局和尺寸
3.1 接口布局

- 30Pin GPIO管脚定义
Pin# Name Pin# Name 1 SYS_3.3V 2 DGND 3 UART2_TX/GPIOD20 4 UART2_RX/GPIOD16 5 I2C0_SCL 6 I2C0_SDA 7 SPI0_MOSI/GPIOC31 8 SPI0_MISO/GPIOD0 9 SPI0_CLK/GPIOC29 10 SPI0_CS/GPIOC30 11 UART3_TX/GPIOD21 12 UART3_RX/GPIOD17 13 UART4_TX/GPIOB29 14 UART4_RX/GPIOB28 15 GPIOB31 16 GPIOB30 17 GPIOC4 18 GPIOC7 19 GPIOC8 20 GPIOC24 21 GPIOC28 22 GPIOB26 23 GPIOD1/PWM0 24 GPIOD8/PPM 25 GPIOC13/PWM1 26 AliveGPIO3 27 GPIOC14/PWM2 28 AliveGPIO5 29 VDD_5V 30 DGND
- 20Pin LVDS接口定义
Pin# Name Pin# Name 1 SYS_3.3V 2 SYS_3.3V 3 GPIOC16 4 GPIOB18 5 DGND 6 DGND 7 LVDS_D0- 8 LVDS_D0+ 9 LVDS_D1- 10 LVDS_D1+ 11 LVDS_D2- 12 LVDS_D2+ 13 DGND 14 DGND 15 LVDS_CLK- 16 LVDS_CLK+ 17 LVDS_D3- 18 LVDS_D3+ 19 I2C2_SCL 20 I2C2_SDA
- DVP Camera接口定义
Pin# Name 1, 2 SYS_3.3V 7,9,13,15,24 DGND 3 I2C0_SCL 4 I2C0_SDA 5 GPIOB14 6 GPIOB16 8,10 NC 11 VSYNC 12 HREF 14 PCLK 16-23 Data bit7-0
- RGB LCD IF 管脚定义
Pin# Name Description 1, 2 VDD_5V 5V输出, 可以给LCD模组供电 11,20,29, 37,38,39,40, 45 DGND 参考地, 0电位 3-10 Blue LSB to MSB RGB的蓝色信号 12-19 Green LSB to MSB RGB的绿色信号 21-28 Red LSB to MSB RGB的红色信号 30 GPIOB25 普通GPIO, 用户可控制 31 GPIOC15 一线协议信号, 以实现LCD型号识别,
背光控制和电阻触摸的功能. 系统已占用, 用户不可重新设置.
32 XnRSTOUT Form CPU 系统复位时向外输出低电平 33 VDEN 指示RGB信号有效的信号 34 VSYNC 场信号 35 HSYNC 行信号 36 LCDCLK LCD频率, Pixel frequency 41 I2C2_SCL I2C2的时钟信号, 用来传输电容屏触摸数据 42 I2C2_SDA I2C2的数据信号, 用来传输电容屏触摸数据 43 GPIOC16 电容触摸中断信号, 配合I2C2使用 44 NC 没有任何连接
- MIPI-DSI接口定义
Pin# Name 1, 2, 3 VDD_5V 4 DGND 5 I2C2_SDA 6 I2C2_SCL 7 DGND 8 GPIOC0 9 DGND 10 GPIOC1 11 DGND 12 GPIOA28 13 nRESETOUT 14, 15 DGND 16 MIPIDSI_DN3 17 MIPIDSI_DP3 18 DGND 19 MIPIDSI_DN2 20 MIPIDSI_DP2 21 DGND 22 MIPIDSI_DN1 23 MIPIDSI_DP1 24 DGND 25 MIPIDSI_DN0 26 MIPIDSI_DP0 27 DGND 28 MIPIDSI_DNCLK 29 MIPIDSI_DPCLK 30 DGND
- MIPI-CSI接口定义
Pin# Name 1, 2 SYS_3.3V 3 DGND 4 I2C0_SDA 5 I2C0_SCL 6 DGND 7 SPI2_MOSI/GPIOC12 8 SPI2_MISO/GPIOC11 9 SPI2_CS/GPIOC10 10 SPI2_CLK/GPIOC9 11 DGND 12 GPIOB9 13 GPIOC2 14, 15 DGND 16 MIPICSI_DN3 17 MIPICSI_DP3 18 DGND 19 MIPICSI_DN2 20 MIPICSI_DP2 21 DGND 22 MIPICSI_DN1 23 MIPICSI_DP1 24 DGND 25 MIPICSI_DN0 26 MIPICSI_DP0 27 DGND 28 MIPICSI_DNCLK 29 MIPICSI_DPCLK 30 DGND
- 说明
- SYS_3.3V: 3.3V电源输出
- VDD_5V: 5V电源输出
- 更详细的信息请查看原理图:NanoPC-T2_1711_Schematic.pdf
3.2 机械尺寸

- 电源接口
- DC电源座子, 适合DC4.0*1.7mm电源插头, 电压范围:4.7~5.6V

4 硬件设计注意事项
4.1 EEPROM
- 因为板上的集成了带MAC地址的EEPROM, 型号为24AA025E48T-I/OT, 接在I2C0上, 设备地址为0x51, 所以有些型号的EEPROM不能接在I2C0上, 否则会地址冲突.
- 不能接在I2C0上的EEPROM: 24C04, 24C08, 24C16, 可以接在I2C0上的EEPROM:24C01, 24C02, 24C256
- 关于EEPROM地址问题, 请看 http://www.onsemi.com/pub_link/Collateral/CAT24C01-D.PDF
5 快速入门
5.1 准备工作
要开启你的NanoPC-T2新玩具,刷机前请先准备好以下硬件
- NanoPC-T2主板
- 大SD卡/: Class10或以上的 8GB SDHC卡
- 一个DC接口的外接电源,要求输出为5V/2A
- 一台支持HDMI输入的显示器或者电视(或选购LCD配件)
- 一套USB键盘鼠标,同时连接还需要USB HUB (或选购串口转接板,要PC上进行操作)
- 一台电脑,需要联网,建议使用Ubuntu 18.04 64位系统
5.2 快速从SD卡启动
首先访问此处的下载地址下载需要的固件文件:
- 您需要准备一张8G或以上容量的SDHC卡,该卡的已有数据将会被破坏,因此请先对SD卡上的数据进行备份。
| Image Files | |
| s5p4418-sd-friendlycore-xenial-4.4-armhf-YYYYMMDD.img.zip | FriendlyCore系统固件 (内置Qt 5.10.0),基于Ubuntu core |
| s5p4418-sd-lubuntu-desktop-xenial-4.4-armhf-YYYYMMDD.img.zip | LUbuntu桌面版固件,自带X Window图形界面 |
| s5p4418-sd-friendlywrt-4.4-YYYYMMDD.img.zip | FriendlyWrt系统固件 (基于OpenWrt定制) |
| s5p4418-sd-android7-YYYYMMDD.img.zip | Android7系统固件 (支持4G LTE) |
| s5p4418-sd-android-kitkat-YYYYMMDD.img.zip | Android4.4系统固件 (支持4G LTE) |
| s5p4418-sd-android-lollipop-YYYYMMDD.img.zip | Android5.1系统固件 |
| s5p4418-eflasher-lubuntu-desktop-xenial-4.4-armhf-YYYYMMDD.img.zip | SD卡映象,用于将lubuntu系统烧写到eMMC |
| s5p4418-eflasher-friendlywrt-4.4-YYYYMMDD.img.zip | SD卡映象,用于将FriendlyWrt系统烧写到eMMC |
| s5p4418-eflasher-android7-YYYYMMDD.img.zip | SD卡映象,用于将Android7系统烧写到eMMC |
| s5p4418-eflasher-friendlycore-xenial-4.4-armhf-YYYYMMDD.img.zip | SD卡映象,用于将friendlycore系统烧写到eMMC |
| s5p4418-eflasher-android-kitkat-YYYYMMDD.img.zip | SD卡映象,用于将android4系统烧写到eMMC |
| s5p4418-eflasher-android-lollipop-YYYYMMDD.img.zip | SD卡映象,用于将android5系统烧写到eMMC |
| Flash Utility: | |
| win32diskimager.rar | Windows utility. Under Linux users can use "dd" |
- 将固件和烧写工具分别解压,在Windows下插入SD卡(限4G及以上的卡),以管理员身份运行 win32diskimager 工具, 在win32diskimager工具的界面上, 选择你的SD卡盘符,选择你要烧写的系统固件,点击 Write 按钮烧写即可。
- 当制作完成 SD 卡后,拔出 SD 卡插入 BOOT 卡槽,按住靠网口位置的boot按键 (如果没有eMMC的板子则不用按) 上电启动(注意,这里需要 5V/2A 的供电),你可以看到板上PWR灯常亮,LED1心跳闪烁,LED2不亮,这时你已经成功启动。
5.3 烧写系统到eMMC
- 下载eflasher固件
固件文件名的格式为:s5p4418-eflasher-OSNAME-YYYYMMDD.img.zip
其中,OSNAME替换为你需要烧写的系统,例如 android、friendly-core等等;
这个固件是的一个SD卡映象,包含了一个用SD卡启动的微型Ubuntu core系统,以及eMMC安装工具EFlasher;
将 s5p4418-eflasher-OSNAME-YYYYMMDD.img.zip 下载到电脑上,另外还需要下载Windows下的烧写工具: win32diskimager.rar;
- 用eflasher固件制作SD启动卡
将固件用7z软件解压,得到.img结尾的文件,在Windows下插入SDHC卡(限8G及以上的卡),以管理员身份运行Win32DiskImager,选择 Image File载入固件,选择你的SD卡盘符,点 Write 即开始写Image到SD卡;
如果你的电脑用的是Linux系统,你也可以用 dd 命令将解压后得到的 .img 文件直接写入SD卡完成启动卡的制作;
- 图形界面: 烧写系统到eMMC
将制作好的SD卡插入NanoPC-T2,连接HDMI或LCD, 将开发板右边的S2开关拨到SD端,拨动电源开关,启动开发板后会看到系统选择,选择你需要烧写到eMMC的系统即可。
- 命令行界面: 烧写系统到eMMC
将制作好的SD卡插入NanoPC-T2,登录串口终端,或者ssh终端,输入如下命令启动EFlasher:
sudo eflasher5.4 在Linux电脑上用脚本制作启动卡
- 1) 将SD卡插入Ubuntu的电脑,用以下命令查看你的SD卡设备名
dmesg | tail
当dmesg输出类拟信息 sdc: sdc1 sdc2时,则表示SD卡对应的设备名为 /dev/sdc,也通过用命令cat /proc/partitions来查看。
- 2) 下载Linux下的制作脚本
git clone https://github.com/friendlyarm/sd-fuse_s5p4418.git
cd sd-fuse_s5p4418
- 3) 以下是制作启动Lubuntu desktop的SD卡的方法
sudo ./fusing.sh /dev/sdx lubuntu
(注:/dev/sdx请替换为实际的SD卡设备文件名)
制作包中未包含系统映象文件,第一次使用时会提示需要下载,输入Y下载,N或10秒未输入则取消。
- 4) 如果只想制成一个用于量产的系统映象文件,方法如下:
sudo ./mkimage.sh lubuntu
更多内容可参考 Assembling the SD card image yourself
5.5 扩展TF卡分区
- Debian/Ubuntu系统在启动的时候,会自动扩展SD卡分区,第一次开机时自动扩展分区和根文件系统。
- Android扩展分区,要在pc上执行下列操作:
sudo umount /dev/sdx? sudo parted /dev/sdx unit % resizepart 4 100 resizepart 7 100 unit MB print sudo resize2fs -f /dev/sdx7
(注:/dev/sdx请替换为实际的SD卡设备文件名)
5.6 关于LCD/HDMI分辨率
系统启动时uboot会自动识别LCD,成功则会设置为该LCD的显示分辨率,失败则缺省会设置为HDMI 720P模式。
如果要修改LCD的显示分辨率,可以直接修改内核中的文件 arch/arm/plat-s5p4418/nanopi2/lcds.c , 然后重新编译内核并更新即可。
对于HDMI的显示模式,Android则是会通过EDID获得HDMI设备如电视机所支持的显示模式,然后自动选择一个合适的分辨率。如果使用的是Debian,则缺省是720P,可通过修改内核配置来切换为1080P。
5.7 在电脑上更改SD卡的启动参数
将制作好SD卡插入一台运行Linux的电脑,可以挂载SD卡上的boot和rootfs等分区,对分区内容进行修改,想更改Kernel Command Line参数,则可以通过fw_setenv工具来操作,方法如下:
先查看当前的内核启动参数:
git clone https://github.com/friendlyarm/sd-fuse_s5p4418.git
cd sd-fuse_s5p4418/tools
./fw_printenv /dev/sdx | grep bootargs
例如要禁用Android的SELinux特性,可以执行以下命令:
./fw_setenv /dev/sdx bootargs XXX androidboot.selinux=permissive
其中上面的XXX需要替换成原来的bootargs值, /dev/sdx替换为你的SD卡设备。
5.8 运行Android或Linux
- 将制作好SD卡插入NanoPC-T2,连接HDMI,按住靠近网口的boot按键,最后接电源(5V 2A)拨动开关,NanoPC-T2会从SD卡启动。你可以看到板上PWR灯常亮,LED1灯闪烁,这说明系统已经开始启动了,同时电视上也将能看到系统启动的画面。
- 要在电视上进行操作,你需要连接USB鼠标和键盘;如果你选购了LCD配件,则可以直接使用LCD上面的触摸屏进行操作。
6 FriendlyCore的使用
6.1 介绍
FriendlyCore,是一个没有X-windows环境,基于Ubuntu core构建的系统,使用Qt-Embedded作为图形界面的轻量级系统,兼容Ubuntu系统软件源,非常适合于企业用户用作产品的基础OS。
本系统除了保留Ubuntu Core的特性以外,还包括以下特性:
- 支持电容和电阻触摸屏 (型号:S700, X710, S70, HD702, S430, HD101, S70等友善电子推出的LCD屏)
- 支持WiFi连接
- 支持以太网连接
- 支持蓝牙,已预装bluez等相关软件包
- 支持音频播放
- 支持Qt 5.10.0 EGLES和OpenGL ES1.1/2.0 (限S5P4418/S5P6818平台)
6.2 运行FriendlyCore
- 对于有HDMI接口的板子,如果要在电视上进行操作,您需要连接USB鼠标和键盘。
- 如果您需要进行内核开发,最好选购一个串口配件,连接了串口,则可以通过串口终端对开发板进行操作。
使用串口模块能有效地提升开发效率,以下是串口模块的连接方法:
接上串口后,您可以选择从串口模块的DC口或者从MicroUSB口 (如果有) 进行供电:
以NanoPi-M1为例:
也可以使用USB转串口模块调试,请注意需要使用5V/2A电源给开发板MicroUSB供电:
以NanoPi-NEO2为例:
- FriendlyCore默认帐户:
普通用户:
用户名: pi 密码: pi
Root用户:
用户名: root 密码: fa
默认会以 pi 用户自动登录,你可以使用 sudo npi-config 命令取消自动登录。
- 更新软件包:
$ sudo apt-get update
6.3 开发Qt应用
请参考 How to Build and Install Qt Application for FriendlyELEC Boards/zh
6.4 开机自动运行Qt示例程序
使用npi-config工具进行开启:
sudo npi-config进入Boot Options -> Autologin -> Qt/Embedded,选择Enable然后重启即可。
6.5 扩展TF卡文件系统
第一次启动FriendlyCore系统时,系统会自动扩展文件系统分区,请耐心等待,TF卡/eMMC的容量越大,需要等待的时间越长,进入系统后执行下列命令查看文件系统分区大小:
df -h
6.6 使用蓝牙传输文件
以传输文件到手机为例进行说明,首先,将你的手机蓝牙设置为可侦测状态,然后执行以下命令开始蓝牙搜索:
hcitool scan
搜索到设备时,结果举例如下:
Scanning ...
2C:8A:72:1D:46:02 HTC6525LVW这表示搜索到一台名为HTC6525LVW的手机,我们记下手机名称前面的MAC地址,然后用sdptool命令查看该手机支持的蓝牙服务:
sdptool browser 2C:8A:72:1D:46:02
注:上述命令中的MAC地址请替换成手机实际的蓝牙MAC地址
这个命令会详细列出手机蓝牙所支持的协议,我们需要关心的是一个名为 OBEX Object Push 的文件传输服务,以HTC6525LVW手机为例,其显示结果如下所示:
Service Name: OBEX Object Push Service RecHandle: 0x1000b Service Class ID List: "OBEX Object Push" (0x1105) Protocol Descriptor List: "L2CAP" (0x0100) "RFCOMM" (0x0003) Channel: 12 "OBEX" (0x0008) Profile Descriptor List: "OBEX Object Push" (0x1105) Version: 0x0100
从上面的信息可以看到,这个手机的OBEX Object Push服务的所用的频道是12, 我们需要将它传递给obexftp命令,最后发起文件传输请求的命令如下:
obexftp --nopath --noconn --uuid none --bluetooth -b 2C:8A:72:1D:46:02 -B 12 -put example.jpg
注:上述命令中的MAC地址、频道和文件名请替换成实际的
执行上述命令后,请留意手机屏幕,正常情况下手机会弹出配对和接收文件的提示,确定后就开始文件传輪了。
蓝牙常见问题:
1) 开发板上找不到蓝牙设备, 可尝试用以下命令开启蓝牙:
rfkill unblock 02) 提示找不到相关命令,可尝试用以下命令安装相关软件:
apt-get install bluetooth bluez obexftp openobex-apps python-gobject ussp-push6.7 连接WiFi
无论是SD WiFi还是USB WiFi, 它们的连接方式都是一样的。正基科技的APXX系列芯片属于SD WiFi,另外系统默认也已经支持市面上众多常见的USB WiFi,已测试过的USB WiFi型号如下:
序号 型号 1 RTL8188CUS/8188EU 802.11n WLAN Adapter 2 RT2070 Wireless Adapter 3 RT2870/RT3070 Wireless Adapter 4 RTL8192CU Wireless Adapter 5 小米WiFi mt7601 6 5G USB WiFi RTL8821CU 7 5G USB WiFi RTL8812AU
目前使用 NetworkManager 工具来管理网络,其在命令行下对应的命令是 nmcli,要连接WiFi,相关的命令如下:
- 切换到root账户
$ su root
- 查看网络设备列表
$ nmcli dev注意,如果列出的设备状态是 unmanaged 的,说明网络设备不受NetworkManager管理,你需要清空 /etc/network/interfaces下的网络设置,然后重启.
- 开启WiFi
$ nmcli r wifi on- 扫描附近的 WiFi 热点
$ nmcli dev wifi- 连接到指定的 WiFi 热点
$ nmcli dev wifi connect "SSID" password "PASSWORD" ifname wlan0
请将 SSID和 PASSWORD 替换成实际的 WiFi名称和密码。
连接成功后,下次开机,WiFi 也会自动连接。
更详细的NetworkManager使用指南可参考这篇文章: Use NetworkManager to configure network settings
如果你的USB WiFi无法正常工作, 大概率是因为文件系统里缺少了对应的USB WiFi固件。对于Debian系统, 可以在Debian-WiFi里找到并安装USB WiFi芯片的固件。而对于Ubuntu系统, 则可以通过下列命令安装所有的USB WiFi固件:
$ apt-get install linux-firmware
一般情况下, 各种WiFi芯片的固件都存放在/lib/firmware目录下。
6.8 配置Wi-Fi无线热点
先执行以下命令,默认情况下如果系统中安装了NetworkManager,会提示你先卸载NetworkManager:
sudo turn-wifi-into-apmode yes
卸载NetworkManager完成后,按提示重启开发板。
重启后,再执行上面的命令一次,这次会提示你输入WiFi热点的名称和密码,按提示操作即可。
操作成功后,你可以在电脑上搜索并连接热点,然后通过192.168.8.1这个地址来登录开发板:
ssh root@192.168.8.1
在提示输入密码时,输入预设的密码fa,即可登入。
为了保证ssh的流畅,我们用以下命令关闭wifi的省电模式:
sudo iwconfig wlan0 power offWiFi工作模式可通过以下命令查询:
sudo cat /sys/module/bcmdhd/parameters/op_mode
输出为数字2则表示当前处于无线热点模式,要切换回普通的Station模式,输入如下命令:
sudo turn-wifi-into-apmode no6.9 使用蓝牙
输入以下命令搜索周边的蓝牙设备:
$ su root
$ hciconfig hci0 up
$ hcitool scan使用hciconfig命令来了解接口的状态。
6.10 连接以太网
默认插上网线开机,会自动连接并通过DHCP获取IP地址,如需要配置静态IP地址,请参考 NetworkManager 的相关文档: Use NetworkManager to configure network settings。
6.11 定制命令行的欢迎信息(文字LOGO)
欢迎信息主要是这个目录下的脚本来打印的:
/etc/update-motd.d/
比如要修改 FriendlyELEC 的大字LOGO,可以修改/etc/update-motd.d/10-header 这个文件,比如要将LOGO改为HELLO,可将以下行:
TERM=linux toilet -f standard -F metal $BOARD_VENDOR
改为:
TERM=linux toilet -f standard -F metal HELLO
6.12 修改时区
例如更改为Shanghai时区:
sudo rm /etc/localtime sudo ln -ls /usr/share/zoneinfo/Asia/Shanghai /etc/localtime
6.13 选择系统默认的音频设备
可以通过下面的操作步骤,设置系统默认的音频设备。
可用以下命令查看系统中所有的声卡设备 (注:不同的开发板结果会有所不同):
pi@NanoPi:~$ aplay -l **** List of PLAYBACK Hardware Devices **** card 0: nanopi2audio [nanopi2-audio], device 0: c0055000.i2s-ES8316 HiFi ES8316 HiFi-0 [] Subdevices: 1/1 Subdevice #0: subdevice #0 card 0: nanopi2audio [nanopi2-audio], device 1: c0059000.spdiftx-dit-hifi dit-hifi-1 [] Subdevices: 1/1 Subdevice #0: subdevice #0
可以看到,硬件上有如下声卡设备:
声卡设备 声卡序号 说明 nanopi2audio device 0 3.5mm耳机输出 nanopi2audio device 1 HDMI输出
要配置成将音频输出到3.5mm耳机接口,可修改配置文件/etc/asound.conf,修改成如下内容:
pcm.!default { type hw card 0 device 0 } ctl.!default { type hw card 0 }
要配置成将音频输出到HDMI,则将上面的device 0修改为device 1。
6.14 运行X11程序
FriendlyCore系统集成了轻量级的Xorg,虽然没有窗口管理器,但是你仍然可以运行单一的X-Windows程序,例如要运行的程序是~/YourX11App,使用以下命令:
. /usr/bin/setqt5env-xcb startx ~/YourX11App -geometry 1280x800
注意 “.” 与 /usr/bin/setqt5env-xcb 之间有一个空格,另外,-geometry后面的分辨率请更改为你的屏幕的实际分辨率。
6.15 运行 Qt 5.10.0 演示程序
FriendlyCore系统集成了Qt 5.10.0图形库,支持OpenGL硬件加速,在命令行输出以下命令,可预览Qt5演示程序,
Qt5演示程序的界面如下图所示,你可以使用触摸屏或者鼠标来操作,Qt5支持大部分FriendlyELEC在售的LCD触摸屏:
$ sudo qt5demo

6.16 运行 Qt5-OpenGL示例
Run the following command
. setqt5env cd $QTDIR cd /examples/opengl/qopenglwidget ./qopenglwidget
更多示例可以在这里找到:
cd $QTDIR/examples/
6.17 硬解播放高清视频
FriendlyCore系统集成支持VPU加速的GStreamer 1.0多媒体开发框架, 可在命令行输入以下命令,播放1080P的演示视频:
sudo gst-player /home/pi/demo.mp4
gst-player是一个GStreamer播放器的外壳程序,上面命令等效于Gsteamer的以下命令:
sudo gst-launch-1.0 filesrc location=/home/pi/demo.mp4 ! qtdemux name=demux demux. ! queue ! faad ! audioconvert ! audioresample ! alsasink device="hw:0,DEV=1" demux. ! queue ! h264parse ! nxvideodec ! nxvideosink dst-x=0 dst-y=93 dst-w=1280 dst-h=533
6.18 连接DVP摄像头模块(CAM500B)
CAM500B是一款500万像素摄像头模块,以DVP并行信号输出,详细信息请参考Matirx-CAM500B。
输入以下命令预览图像:
gst-launch-1.0 -e v4l2src device=/dev/video6 ! video/x-raw,format=I420,framerate=30/1,width=1280,height=720 ! nxvideosink
输入以下命令开始录像 (VPU硬编码):
gst-launch-1.0 -e v4l2src device=/dev/video6 ! video/x-raw,format=I420,framerate=30/1,width=1280,height=720 ! tee name=t t. \ ! queue ! nxvideosink t. ! queue ! nxvideoenc bitrate=12000000 ! mp4mux ! \ filesink location=result_720.mp4
6.19 电源管理: 关机和定时开机
“PMU Power Management” 特性支持 软件关机和定时开机功能.
使用方法如下:
设置100秒后自动开机 (设置的时间不得低于60秒):
$ sudo echo 100 > /sys/class/i2c-dev/i2c-3/device/3-002d/wakealarm
设置了定时开机之后,就可以用 poweroff 关机了:
$ sudo poweroff
以下命令用于取消定时开机:
$ sudo echo 0 > /sys/class/i2c-dev/i2c-3/device/3-002d/wakealarm
用以下命令查询当前的设置, 前面的是单片机当前时间,后面是定时开机时间,如果定时开机已禁止就是 disabled:
$ sudo cat /sys/class/i2c-dev/i2c-3/device/3-002d/wakealarm
需要注意的是,旧版本的硬件由于没有集成PMU所以可能没有这个功能,如果你在文件系统里没有发现这个文件节点:
/sys/class/i2c-dev/i2c-3/device/3-002d/wakealarm
那就是说明你所用的硬件不支持这个特性。
6.20 安装与使用 OpenCV 4.1.2
在新版本的 FriendlyCore 中已经预装了 OpenCV 4.1.2,无需手动安装,如需手动安装到自已的系统中,可参考以下仓库:
https://github.com/friendlyarm/install-opencv-on-friendlycore/blob/s5pxx18/README.md
运行OpenCV示例:
. /usr/bin/cv-env.sh . /usr/bin/setqt5env-eglfs cd /usr/local/share/opencv4/samples/python python3 turing.py
6.21 安装与使用 Caffe
使用如下命令:
git clone https://github.com/friendlyarm/install-caffe-on-friendlycore cd install-caffe-on-friendlycore sudo ./install-caffe.sh
6.22 Docker在armhf系统下的安装与使用
6.22.1 安装 Docker
执行下列命令:
sudo apt-get update sudo apt-get install docker.io
6.22.2 测试 Docker
执行下列命令运行一个简单的docker image:
git clone https://github.com/friendlyarm/debian-jessie-arm-docker cd debian-jessie-arm-docker ./rebuild-image.sh ./run.sh
7 Android系统的使用
7.1 Android7 下使用4G模块EC20
7.1.1 连接方法
连接时,需要通过USB to miniPCIe转接板转接EC20,再连接到主板的USB Host端口,以T2为例,如下图所示:

连接后无需额外的配置,启动Android后就可以使用4G上网了,跟Android手机类拟。
7.2 更换Android开机Logo
替换下面路径下的 logo.bmp:
/opt/FriendlyARM/smart4418/android/device/friendlyelec/nanopi3/boot/logo.bmp /opt/FriendlyARM/smart4418/android/device/friendlyelec/nanopi2/boot/logo.bmp
重新编译 Android 源代码。
7.3 使用fastboot命令烧写android固件
上电时在串口终端敲回车进入uboot命令行模式,然后输入以下命令:
fastboot 0For S5P4418, PC端可使用以下命令来更新emmc:
fastboot flash partmap partmap.txt fastboot flash 2ndboot bl1-mmcboot.bin fastboot flash fip-loader loader-mmc.img fastboot flash fip-secure bl_mon.img fastboot flash fip-nonsecure bootloader.img fastboot flash boot boot.img fastboot flash system system.img fastboot flash cache cache.img fastboot flash userdata userdata.img
For S5P6818, PC端可使用以下命令来更新emmc:
fastboot flash partmap partmap.txt fastboot flash 2ndboot bl1-mmcboot.bin fastboot flash fip-loader fip-loader.img fastboot flash fip-secure fip-secure.img fastboot flash fip-nonsecure fip-nonsecure.img fastboot flash boot boot.img fastboot flash system system.img fastboot flash cache cache.img fastboot flash userdata userdata.img
7.4 Android证书
Android 5 我们缺省采用的是自己生成的证书,位于:
vendor/friendly-arm/nanopi3/security/
Android 7 缺省采用的是:
build/target/product/security/
7.5 Android7只连接HDMI的情况下性能优化
7.5.1 背景说明
默认情况下,驱动会初始化两个framebuffer,分别用于主显示LCD和HDMI,如果项目需求只需要使用HDMI,不需要用LCD,则可以根据本章节的步骤进行修改,修改后会将HDMI设置为主显示,这样驱动只会初始化一个framebuffer,节约资源,对UI性能和开机速度会有相应的提升。
本章节内容仅适用于 S5P6818 Android7, S5P4418修改方法类拟,只是需要调整一下相应的文件。
7.5.2 修改内核
需要修改内核dts,禁止dp_drm_lvds节点, 如下所示:
--- a/arch/arm64/boot/dts/nexell/s5p6818-nanopi3-common.dtsi +++ b/arch/arm64/boot/dts/nexell/s5p6818-nanopi3-common.dtsi @@ -810,6 +810,7 @@ plane-names = "video", "rgb", "primary"; }; port@1 { + status = "disabled"; reg = <1>; back_color = < 0x0 >; color_key = < 0x0 >; @@ -820,7 +821,7 @@ &dp_drm_lvds { remote-endpoint = <&lcd_panel>; - status = "ok"; + status = "disabled"; display-timing { clock-frequency = <50000000>;
编译后将获得新的 arch/arm64/boot/dts/nexell/s5p6818-nanopi3-rev*.dtb。
测试阶段可直接通过adb 更新到板子,命令如下:
adb root; adb wait-for-device; adb shell mkdir /storage/sdcard1/; adb shell mount -t ext4 /dev/block/mmcblk0p1 /storage/sdcard1/ adb push arch/arm64/boot/dts/nexell/s5p6818-nanopi3-rev*.dtb /storage/sdcard1/
完整的固件则需要替换android7源代码目录 device/friendlyelec/nanopi3/boot 下的文件
7.5.3 修改env.conf
修改 device/friendlyelec/nanopi3/boot/env.conf 增加一行:
lcdtype HDMI1080P60
此模式需要与android7启动后探测到的模式相同,否则会导致长时的黑屏状态,甚至无显示输出, 或者进入uboot命令行环境手工设置:
setenv lcdtype HDMI1080P60; saveenv; reset
7.5.4 修改system.prop
修改android7中 device/friendlyelec/nanopi3/system.prop
ro.sf.lcd_density=240或其它自己认为更合适的值, 也可串口或adb环境下,wm density 240 来调整观察效果是否合适。
7.5.5 编译Android
根据wiki说明编译android 7并测试,遇到异常则请仔细检查前面的步骤
8 更多OS
8.1 DietPi
![]()
DietPi is a highly optimised & minimal Debian-based Linux distribution. DietPi is extremely lightweight at its core, and also extremely easy to install and use.
Setting up a single board computer (SBC) or even a computer, for both regular or server use, takes time and skill. DietPi provides an easy way to install and run favourite software you choose.
For more information, please visit this link https://dietpi.com/docs/.
DietPi supports many of the NanoPi board series, you may download the image file from here:
9 如何编译系统
9.1 安装交叉编译器
首先下载并解压编译器:
git clone https://github.com/friendlyarm/prebuilts.git -b master --depth 1 cd prebuilts/gcc-x64 cat toolchain-4.9.3-armhf.tar.gz* | sudo tar xz -C /
然后将编译器的路径加入到PATH中,用vi编辑vi ~/.bashrc,在末尾加入以下内容:
export PATH=/opt/FriendlyARM/toolchain/4.9.3/bin:$PATH export GCC_COLORS=auto
执行一下~/.bashrc脚本让设置立即在当前shell窗口中生效,注意"."后面有个空格:
. ~/.bashrc这个编译器是64位的,不能在32位的Linux系统上运行,安装完成后,你可以快速的验证是否安装成功:
arm-linux-gcc -v Using built-in specs. COLLECT_GCC=arm-linux-gcc COLLECT_LTO_WRAPPER=/opt/FriendlyARM/toolchain/4.9.3/libexec/gcc/arm-cortexa9-linux-gnueabihf/4.9.3/lto-wrapper Target: arm-cortexa9-linux-gnueabihf Configured with: /work/toolchain/build/src/gcc-4.9.3/configure --build=x86_64-build_pc-linux-gnu --host=x86_64-build_pc-linux-gnu --target=arm-cortexa9-linux-gnueabihf --prefix=/opt/FriendlyARM/toolchain/4.9.3 --with-sysroot=/opt/FriendlyARM/toolchain/4.9.3/arm-cortexa9-linux-gnueabihf/sys-root --enable-languages=c,c++ --with-arch=armv7-a --with-tune=cortex-a9 --with-fpu=vfpv3 --with-float=hard ... Thread model: posix gcc version 4.9.3 (ctng-1.21.0-229g-FA)
9.2 编译 FriendlyCore/Lubuntu/EFlasher的内核源代码
9.2.1 编译内核
- 下载内核源代码
git clone https://github.com/friendlyarm/linux.git -b nanopi2-v4.4.y --depth 1 cd linux
NanoPC-T2内核所属的分支是nanopi2-v4.4.y,在开始编译前先切换分支。
- 编译Ubuntu内核
touch .scmversion make ARCH=arm nanopi2_linux_defconfig make ARCH=arm
编译成功结束后,新生成的内核是 arch/arm/boot/zImage,目录arch/arm/boot/dts/下还包括新的DTB文件(s5p4418-nanopi2-rev*.dtb),用于替换掉SD卡boot分区下对应的文件。
9.2.2 Linux下使用新编译的内核
- 更新SD卡上的内核
如果您是使用SD卡启动Ubuntu系统,则在PC上复制编译生成的zImage和DTB文件到SD卡的boot分区(即分区1,设备是/dev/sdX1)即可。
- 更新eMMC系统上的内核
从eMMC启动时可通过以下方法来更新内核:
1) 启动完成后,系统通常会自动mount eMMC的boot分区(设备是/dev/mmcblk0p1), 可输入命令mount来查看;
2) 连接网络,使用scp/ftp等方式复制新编译的zImage和DTB文件并替换boot分区下的文件;
3) 也可以将编译好的内核复制到SD卡或U盘,然后到开发板上复制到boot分区下;
4) 更新完成后,输入 reboot 命令重启即可,注意不要直接断电或按Reset键,否则可能会损坏文件.
- 使用新的内核来生成boot.img
请参考这个git仓库: https://github.com/friendlyarm/sd-fuse_s5p4418
9.3 编译Android7的内核源代码
Android 7.1.2源代码已包含预先编译好的内核,如果需要进行定制,可根据以下方法编译内核。
git clone https://github.com/friendlyarm/linux.git -b nanopi2-v4.4.y --depth 1 cd linux touch .scmversion make ARCH=arm nanopi2_nougat_defconfig make ARCH=arm
编译成功结束后,新生成的内核是 arch/arm/boot/zImage,目录arch/arm/boot/dts/下还包括新的DTB文件(s5p4418-nanopi2-rev*.dtb)。 如果只想调试内核,可通过 adb 来快速更新。
adb root; adb shell mkdir /storage/sdcard1/; adb shell mount -t ext4 /dev/block/mmcblk0p1 /storage/sdcard1/; adb push arch/arm/boot/zImage arch/arm/boot/dts/s5p4418-nanopi2-rev*.dtb /storage/sdcard1/
内核开发/调试完成后,如果想生成用于烧写的boot.img,可复制内核zImage和DTB文件到Android7源代码目录 device/friendlyelec/nanopi2/boot,然后重新编译Android7。
9.4 编译 Android7/FriendlyCore/Lubuntu/EFlasher的U-Boot源代码
下载U-Boot v2016.01源代码并编译,注意分支是nanopi2-v2016.01
git clone https://github.com/friendlyarm/u-boot.git cd u-boot git checkout nanopi2-v2016.01 make s5p4418_nanopi2_defconfig make CROSS_COMPILE=arm-linux-
编译成功结束后您将获得bootloader.img,可以通过fastboot、sd-fuse_s5p4418和eflasher来更新板上的U-Boot v2016.01。
For Android7: 可复制bootloader.img到Android7源代码目录 device/friendlyelec/nanopi2/boot,然后重新编译Android7。
需要特别注意的是,不同版本的U-Boot不能交叉更新,不能使用fastboot更新现在运行的U-Boot v2014.07,也不能使用bootloader.img去替换一个ROM中的u-boot.bin,否则会导致系统无法正常启动。
9.5 编译Android7.1.2
9.5.1 搭建编译环境
搭建用于编译Android的环境,建议使用64位的Ubuntu 16.04,需要安装如下软件包:
sudo apt-get install bison g++-multilib git gperf libxml2-utils make python-networkx zip sudo apt-get install flex curl libncurses5-dev libssl-dev zlib1g-dev gawk minicom sudo apt-get install openjdk-8-jdk sudo apt-get install exfat-fuse exfat-utils device-tree-compiler liblz4-tool
更多说明可查看 https://source.android.com/source/initializing.html;
9.5.2 下载Android7源代码
有以下两种途径获取 Android7 的源代码,都需要联网:
- 使用网盘里的git repo压缩包
网盘下载地址: 点击进入
文件位于网盘的以下路径:sources/s5pxx18-android-7.git-YYYYMMDD.tar (YYYYMMDD表示打包的日期)
从网盘中获取的压缩包在解压之后,需要执行一下 sync.sh 脚本,会从gitlab上拉取最新的代码:
tar xvf /path/to/netdisk/sources/s5pxx18-android-7.git-YYYYMMDD.tar cd s5pxx18-android-7 ./sync.sh
- 直接克隆git仓库
NanoPC-T2 源代码托管在 gitlab 上,使用以下命令进行下载:
git clone https://gitlab.com/friendlyelec/s5pxx18-android-7.git -b master
由于Android7源代码较大(约8.2GB),下载可能需要较长时间且容易受网络环境的影响而中断,请耐心等待并重试。
9.5.3 开始编译
cd s5pxx18-android-7 source build/envsetup.sh lunch aosp_nanopi2-userdebug make -j8
编译成功完成后,目录 out/target/product/nanopi2/ 下包含可用于烧写的image文件。
filename partition Description bl1-mmcboot.bin raw boot firmware loader-mmc.img raw boot firmware bl_mon.img raw boot firmware bootloader.img raw uboot-v2016.01 env.conf - uboot环境变量,包含Android内核命令行参数 boot.img boot kernel zImage, DTBs; logo; Android ramdisk cache.img cache - userdata.img userdata - system.img system - partmap.txt - 分区描述文件
10 编译内核头文件安装包
以下操作在在开发板上进行:
10.1 本文适用于如下版本的固件
固件文件名: s5p4418-sd-friendlycore-xenial-4.4-armhf-YYYYMMDD.img, s5p4418-eflasher-friendlycore-xenial-4.4-armhf-YYYYMMDD.img 具体信息:
pi@NanoPC-T2:~$ lsb_release -a No LSB modules are available. Distributor ID: Ubuntu Description: Ubuntu 16.04.6 LTS Release: 16.04 Codename: xenial pi@NanoPC-T2:~$ cat /proc/version Linux version 4.4.172-s5p4418 (root@jensen) (gcc version 7.5.0 (ctng-1.24.0-108g-FA) ) #1 SMP PREEMPT Wed Mar 24 15:17:25 CST 2021
10.2 安装所需软件包
sudo apt-get update sudo apt-get install -y dpkg-dev bsdtar
10.3 制作内核头文件安装包
git clone https://github.com/friendlyarm/linux -b nanopi2-v4.4.y --depth 1 kernel-s5pxx18-arm cd kernel-s5pxx18-arm rm -rf .git make distclean touch .scmversion make CROSS_COMPILE= ARCH=arm nanopi2_linux_defconfig alias tar=bsdtar make CROSS_COMPILE= ARCH=arm bindeb-pkg -j4
显示如下信息表示成功:
dpkg-deb: building package 'linux-firmware-image-4.4.172-s5p4418' in '../linux-firmware-image-4.4.172-s5p4418_4.4.172-s5p4418-1_armhf .deb'. dpkg-deb: building package 'linux-headers-4.4.172-s5p4418' in '../linux-headers-4.4.172-s5p4418_4.4.172-s5p4418-1_armhf.deb'. dpkg-deb: building package 'linux-libc-dev' in '../linux-libc-dev_4.4.172-s5p4418-1_armhf.deb'. dpkg-deb: building package 'linux-image-4.4.172-s5p4418' in '../linux-image-4.4.172-s5p4418_4.4.172-s5p4418-1_armhf.deb'. dpkg-genchanges: binary-only upload (no source code included)
10.4 安装
sudo rm -f /lib/modules/4.4.172-s5p4418/build sudo rm -f /lib/modules/4.4.172-s5p4418/source sudo dpkg -i ../linux-headers-4.4.172-s5p4418_4.4.172-s5p4418-1_armhf.deb
10.5 测试
以编译pf_ring模块为例, 参考文档 https://www.ntop.org/guides/pf_ring/get_started/git_installation.html.
git clone https://github.com/ntop/PF_RING.git cd PF_RING/kernel/ make CROSS_COMPILE=
编译完成后, 使用insmod尝试加载模块:
sudo insmod ./pf_ring.ko
11 扩展连接
11.1 NanoPC-T2连接USB(FA-CAM202)200万摄像头模块
- NanoPC-T2使用Debian系统,假设你已接好LCD屏或者HDMI,进入系统后,点击左下角的菜单键“Other”-->xawtv,打开USB Camera软件。进入“welcome to xawtv!”,选择OK即可进行拍照。


11.2 NanoPC-T2连接CMOS 500万摄像头模块
CAM500A 500万摄像头模块的详情请查看[1]
- Android5.1系统,假设你已经接好LCD屏或者HDMI,进入系统后,直接点击“Camera”图标,即可打开摄像头进行拍照和录制视频。

- Debian系统集成了命令行的摄像头示例程序nanocams,登录后输入以下命令即可预览40桢然后拍照保存为指定的文件。
sudo nanocams -p 1 -n 40 -c 4 -o IMG001.jpg
更详细的命令行参数可执行命令“nanocams -h”。 如果要下载源代码,运行以下命令即可获得:
git clone https://github.com/friendlyarm/nexell_linux_platform.git
- FriendlyCore (4.4内核)可使用以下命令:
输入以下命令预览图像:
gst-launch-1.0 -e v4l2src device=/dev/video6 ! video/x-raw,format=I420,framerate=30/1,width=1280,height=720 ! nxvideosink
输入以下命令开始录像 (VPU硬编码):
gst-launch-1.0 -e v4l2src device=/dev/video6 ! video/x-raw,format=I420,framerate=30/1,width=1280,height=720 ! tee name=t t. \ ! queue ! nxvideosink t. ! queue ! nxvideoenc bitrate=12000000 ! mp4mux ! \ filesink location=result_720.mp4
11.3 NanoPC-T2接USB摄像头使用OpenCV
- OpenCV的全称是Open Source Computer Vision Library,是一个跨平台的计算机视觉库。
- NanoPC-T2跑Debian系统时,接USB Camera,可直接使用官方的OpenCV。
1、以下介绍的是NanoPC-T2用C++使用的OpenCV:
- 首先需要保证你的NanoPC-T2能连外网,假如你有串口,直接串口登陆超级终端(或者ssh登陆)。进入系统后,输入用户名(root),密码(fa)登陆;
- 以下命令在超级终端执行:
apt-get update apt-get install libcv-dev libopencv-dev
2、NanoPC-T2烧写Debian系统启动后,接上USB Camera,使用Debian系统自带的摄像头软件测试,确定摄像头能正常使用。
3、通过终端执行命令,查看你的摄像头设备:
ls /dev/video*
- 注:video0 是你的USB摄像头设备
4、opencv的测试代码(官方C++示例代码)在 /home/fa/Documents/opencv-demo, 使用以下命令即可编译:
cd /home/fa/Documents/opencv-demo make
编译成功后,得到可执行文件demo
5、以下步骤需要在NanoPC-T2上接上键盘执行:
./demo你便可以看到opencv已经用起来。
11.4 串口扩展GPS模块
- Matrix-GPS是一款体积小巧,性能优越的GPS定位模块,适用于导航仪、四轴飞行器定位等应用场景。
- Matrix-GPS模块采用串口通讯,NanoPC-T2上电进入系统后,在终端命令行执行以下命令,或者点击图标“xgps”,即可进行搜星定位功能。
$su - fa -c "DISPLAY=:0 xgps 127.0.0.1:9999"
- 或者,在debian界面上打开终端 LXTerminal ,输入 xgps 回车也可以打开GPS功能。
串口扩展模块的详情请查看点击查看
参考下图连接模块Matrix-GPS和NanoPC-T2:

连接说明:
| Matrix-GPS | NanoPC-T2 |
| RXD | Pin11 |
| TXD | Pin12 |
| 5V | Pin29 |
| GND | Pin30 |
12 在Android下访问硬件资源
友善电子开发了一个名为libfriendlyarm-things.so的函数库,用于Android应用程序访问开发板上的硬件资源,该函数库基于Android-NDK技术开发,提供便利的硬件访问接口,开发者无需掌握过多的嵌入式知识便可使用,有效提高开发进度。
目前支持的硬件设备包括:
- Serial Port
- PWM
- EEPROM
- ADC
- LED
- LCD 1602 (I2C)
- OLED (SPI)
支持的接口包括:
- GPIO
- Serial Port
- I2C
- SPI
详情使用说明可参考以下网址:
- 硬件库主页: http://wiki.friendlyelec.com/wiki/index.php/FriendlyThings/zh
- 示例源代码仓库: https://github.com/friendlyarm/friendlythings-examples
- 中文API参考手册: http://wiki.friendlyelec.com/wiki/index.php/FriendlyThings_APIs/zh
13 支持LCD型号
- Android
NanoPC-T2跑Android系统目前支持的LCD型号为友善出品的:S430、S700、S702、HD700、HD702、HD101、X710电容屏。
- FriendlyCore & Lubuntu Desktop
NanoPC-T2目前支持的LCD型号为友善出品的:S430、S700、S702、HD700、HD702、HD101、X710电容屏;
支持的电阻屏为友善出品的:W35B、H43、P43、S70、Matrix - 2'8 SPI Key TFT 电阻屏。
以上所有LCD屏的详细资料均可在维基首页查看:LCDModules
14 原理图,Datasheet和尺寸图
- 原理图(NanoPC-T2-T3-1711-Schematic.pdf)
- 原理图(NanoPC-T2_1601B_Schematic.pdf)
- PCB尺寸图(NanoPC-T2-T3_1711_Draw_dxf.zip)
- PCB尺寸图(NanoPC-T2-Dimensions(dxf))
- 位号图(Component-Position-Diagram)
- S5P4418 Datasheet (S5P4418_Datasheet_0.1.pdf)
15 资源链接
15.1 开发资料
- AXP228_Users_ManualAXP228_V1.1_20130106
- eMMCeMMC5.0_1xnm_based_e_MMC
- SEC_Users_Manual_S5P4418_Users_Manual_Preliminary[2]
15.2 创客秘籍及开发教程
- 《创客秘籍》创客秘籍
- 《创客秘籍-02》创客秘籍-02
- 《创客秘籍-03》创客秘籍-03
- 模块介绍以及开发文档:
- 按键模块
- LED模块
- 模数转换
- 继电器模块
- 三轴重力加速度模块
- 三轴数字指南针模块
- 温度传感器模块
- 温湿度传感器模块
- 蜂鸣器
- 摇杆模块(Joystick)
- I2C(PCF8574)+LCD1602
- 声音传感器
- 超声波模块
- GPS模块
- 迷你扩展板Matrix - Compact Kit
- 火焰传感器
- CAM500 500万像素摄像头
- 滚珠开关模块
- 2'8 SPI Key TFT 2.8寸spi液晶屏
- 红外计数模块
- 红外接收模块
- 电机驱动器模块
- MQ-2 烟雾传感器模块
- MQ-3 气体传感器
- 单点电容式数字触摸传感器模块
- 光敏电阻模块
- 电位器模块
- 压力传感器模块
- RGB LED
- RTC模块
- Rotary Encoder
- 土壤湿度检测传感器模块
- 热敏电阻模块
- USB WiFi
- 水位/水滴识别检测传感器模块
16 源代码和烧写文件的下载地址
- Image File: http://download.friendlyelec.com/NanoPC-T2
- Source Code: https://github.com/friendlyarm
17 技术支持
If you have any further questions please visit our forum http://www.friendlyarm.com/Forum/ and post a message or email us at techsupport@friendlyarm.com. We will endeavor to get back to you as soon as possible.
18 更新日志
18.1 日期 2023-01-09
18.1.1 FriendlyCore更新说明:
- 优化了开机服务
18.2 日期 2020-10-26
- FriendlyCore, Lubuntu更新如下:
修正蓝牙稳定性问题
18.3 日期 2019-12-28
- eflasher更新如下:
1) 支持只烧写部分文件,例如仅更新emmc内的内核和uboot
2) 在界面上增加禁用overlay filesystem选项
3) 增加命令行参数,方便脚本调用,可以实现无交互的一键安装
4) 修正备份与恢复镜像后,不同设备会出现相同mac地址的问题
5) UI界面现在可以配置标题,隐藏界面菜单与按钮
18.4 日期 2019-11-26
- FriendlyCore:
预装 OpenCV 4.1.2
18.5 日期 2019-11-14
- 新系统 FriendlyWrt:
推出完全开源的FriendlyWrt路由器系统, 基于官方OpenWrt定制,详情可查看:http://wiki.friendlyelec.com/wiki/index.php/How_to_Build_FriendlyWrt
- FriendlyCore, Lubuntu更新如下:
1)增加了新的4.3寸屏YZ43的支持
2)编译bcmdhd为模块,方便加载模块时传递参数以及定制
- Android7更新如下:
1)增加了新的4.3寸屏YZ43的支持
2)优化Android 7系统下使用HD900屏幕与S702屏幕时的触摸与按键体验
18.6 日期 2019-10-18
- Android7 与 FriendlyCore, Lubuntu更新如下:
修正音频播放在某些情况下可能会出现杂音的问题。
18.7 日期 2019-09-30
- Android7 更新如下:
1)增加Android硬件访问库FriendlyThing的支持,支持GPIO、PWM、RTC、串口和看门狗等硬件资源的访问,提供开源demo
2) 增加摄像头 CAM500B (OV5640) 的支持
3) 增加 LCD-W500 (800x480) 的支持
4) 修正 LCD-S430 的兼容性问题
- FriendlyCore, Lubuntu 更新如下:
1) 内核版本更新到 v4.4.172,与Android 7内核保持一致
2) 增加Docker的支持, 支持32bit与64bit文件系统 (使用方法请在具体产品的wiki页面搜索docker)
3) 内核配置项进行了优化,启用更多特性与设备驱动
18.8 日期 2019-07-18
- 新系统 Android 7.1.2
1) 推出新的系统 Android 7.1.2, 特性与旧版本的Android 5基本保持一致,支持4G,WiFi,以太网,蓝牙等
2) 内核版本为 4.4.172
3) 已知问题:摄像头暂时还不能工作
- Android/FriendlyCore/Lubuntu 更新:
1) 修复某些情况下HD101B无法触摸的问题
2) 修复Power key的GPIO配置
3) 解决音量过小的问题:播放时DAC的音量由 -20dB 修改为 -6dB
4) 集成了驱动模块(rtl8821CU.ko, rtl88XXau.ko)以增加更多型号的USB Wi-Fi支持
- 仅适用于Lubuntu的更新:
1) 修改Lubuntu的Power key行为为(不弹出窗口)直接关机
2) 集成脚本xrotate.sh用于简化屏幕旋转设置 (注:屏幕旋转会损失性能)
- 仅适用于NanoPC T2,Smart4418的更新:
支持从板载EEPROM中读取以太网Mac地址,仅支持以下系统:FriendlyCore, Lubuntu, Android7
18.9 日期 2019-06-25
Linux(Ubuntu 16.04/18.04) 全面采用 OverlayFS,以增强文件系统的稳定性
18.10 日期 2019-06-03
1) 配置LED1为心跳模式
2) 修复HDMI 1080P可能在某些情况下无显示的问题
3)Linux下修复无法安装 mysql 的问题
4)修复lubuntu下1-wire触摸电阻屏无法使用的问题
18.11 日期 2019-01-24
1) 增加新的LCD型号HD702V的支持
2) 优化Linux下Qt5的字体
18.12 日期 2018-12-17
- Android5 更新如下:
1) 增加4G网络的支持,支持模块的型号为:Quectel EC20
2) 增加音频输出设置,可设置默认输出到耳机或者HDMI
3) 在系统Shutdown时,同步关闭一线触摸屏的背光
- FriendlyCore更新如下:
1) 增加OV5640摄像头支持
2) 更新BL1以提高系统启动的稳定性
- Lubuntu更新如下:
1) 增加chromium-browser浏览器,支持网页硬解播放, 支持WebGL
2) 将音频输出通道默认设置为HDMI (可通过/etc/asound.conf更改)
3) 更新BL1以提高系统启动的稳定性
4) 修正前一版本中存在的一些关于软件包报错的issue
5) 调整DPMS设置,默认关闭自动休眠
18.13 日期 2018-09-06
- 增加10.1寸屏 HD101B 的支持
- 提高一线屏识别的可靠性
18.14 日期 2018-08-11
FriendlyCore:
- 升级 Qt版本到 5.10,增加 xcb 插件
- 增加Qt在目标板的编译工具,可直接在开发板上编译Qt程序
- 预装最小版本的 xorg
- 增加 OpenCV 的安装支持,详请可查看:https://github.com/friendlyarm/install-opencv-in-friendlycore
Android5:
- 增加永不睡眠的设置选项
18.15 日期 2018-03-24
- 修正只连接HDMI的情况下开机没图像显示的问题
- 增加蓝牙的支持
以上更新适用于所有4.4内核的系统,包括FriendlyCore和Lubuntu。
18.16 日期 2017-06-13
Linux, Android系统:
- 改善了整体系统稳定性;
Android系统:
- 提升Android下ov5640拍照的稳定性;
18.17 日期 2017-04-18
Ubuntu-Core系统更新如下:
- 修改了登录欢迎界面,当用户登录时会打印系统的基本状态信息;
- 增加 npi-config 工具,npi-config是一个命令行下的系统配置工具,可以对系统进行一些初始化的配置,可配置的项目包括:用户密码、系统语言、时区、Hostname、SSH开关、自动登录选项等,在命令行执行以下 sudo npi-config 即可进入;
- 预装NetworkManager作为网络管理工具;
- 新增pi用户,并配置为自动登录,自动登录特性可以使用npi-config工具配置;
18.18 日期 2017-03-08
1) 启用UART2
2) 增加HD101B屏幕的支持
3) Android4.4和Android5增加硬件访问库,具体可参考:[3]
4) 修正S430屏在Android4.4下的闪退问题
18.19 日期 2017-02-09
1) 在Ubuntu Core和Debian系统中 增加7寸电阻屏 S70B 的支持
2) 调整了 eFlasher Rom 的分区大小,将根分区调整为 1GB
18.20 日期 2016-11-17
增加H43屏的支持:
1) 支持s5p4418与s5p6818平台的开发板
2) OS方面仅支持Debian 和 Ubuntu Core系统,不支持Android
18.21 日期 2016-09-02
1) Debian 和 Ubuntu Core集成了CAM500A(ov5640)摄像头的demo程序(nanocams);
2) 更新了Android 串口访问的程序,下载源代码:
git clone https://github.com/friendlyarm/android_SerialPortDemo.git
以前下载过的,用git pull命令更新一下。
内有详细说明,包括eclipse编译、打包成apk,对apk重新签名以获取system权限、关闭selinux等说明文档: <<SerialPortDemo-manual.pdf>>;
本次更新适用于NanoPi2, NanoPi 2 Fire, NanoPi-M2, NanoPC-T2, Smart4418
18.22 日期 2016-08-20
1) 推出Android4.4固件(s5p4418-kitkat-sd4g-20160803.img.zip) 和源码,Android4.4是专门为企业用户定制,并且支持4G通讯模块,即插即用;
2) 推出一键烧写系统的固件s5p4418-eflasher-sd8g-xxx-full.img,直接下载固件回来使用LCD即可一键烧写系统;
本次更新适用于NanoPi2, NanoPi 2 Fire, NanoPi-M2, NanoPC-T2, Smart4418
18.23 日期 2016-07-01
1) 修复了Ubuntu Core下USB Wi-Fi无法加载固件的问题;
2) 更新了Bootloader,支持使用dd命令直接将RAW image写入eMMC并能正常启动;
3) 内核bug修正及提高稳定性;
本次更新适用于NanoPi2, NanoPi 2 Fire, NanoPi-M2, NanoPC-T2, Smart4418
18.24 日期 2016-05-21
- Android
1) 增加以太网设置(支持静态IP和DHCP设置);
2) 增加硬件访问库 libfriendlyarm-things.so,可用于在Android下操作串口;
使用方法可参考此份文档:http://www.arm9home.net/read.php?tid-82748.html。
在 NanoPi2/NanoPi M2/NanoPi2 Fire/NanoPC-T2 上,串口对应的设备名称如下:
UART2 -> 未驱动
UART3 -> /dev/ttyAMA2
UART4 -> /dev/ttyAMA3
3) 增加iTest应用程序,内置串口助手功能;
注意:运行此串口程序,需要使用system权限。
- Debian
1)增强了内核稳定性;
- Ubuntu core with Qt-Embedded
1)开机后显示的界面由Qt Demo换成了一个由友善之臂开发的,开源的Qt程序 (源代码位于/opt
目录),该程序启动时显示系统状态信息,例如CPU和内存信息,工作温度和负载等信息,
系统同时集成了 qmake,uic 等Qt工具的arm版本,这样你 就可以在开发板上直接生成和编译Qt源代码。
本次更新适用于NanoPi2, NanoPi 2 Fire, NanoPi-M2, NanoPC-T2, Smart4418
18.25 日期 2016-04-19
1)增加Debian/Ubuntu第一次开机时自动扩展分区和根文件系统,第一次启动时间会稍长
2) 改善非正常关机/重启导致的根文件系统问题;
3) Debian/Ubuntu Core集成原厂开源硬解播放器NxPlayerConsole,须连LCD使用。(原厂库没有源代码)
4) Ubuntu Core集成了OpenGL的测试程序gltest1, 完全开源
5)Debian/Ubuntu Core增加了USB Wi-Fi - rtl8187的支持;
6) Debian/Ubuntu Core系统的USB摄像头的设备修改为 /dev/video0,方便opencv
7) 用wpa_supplicant代替wicd来管理无线网络,使得Console下和X下的网络配置接口上保持一致
本次更新适用于NanoPi2, NanoPi 2 Fire, NanoPi-M2, NanoPC-T2, Smart4418
18.26 日期 2016-04-01
- Debian:
1) Debian增加了常用USB Wi-Fi和USB串口的支持;
2) 修正了带声卡的板音频输出切换的问题;
3) 优化内核,改进稳定性;
4) 增加LVDS接口的支持(缺省未启用);
- Ubuntu core with Qt-Embedded系统
新增系统:Ubuntu Core with Qt-Embedded,这是一个没有X-windows环境,使用Qt-Embedded作为图形界面的轻量级Ubuntu系统,基于官方的Ubuntu core系统开发而成,非常适合于企业用户用作产品的基础OS。
本系统除了保留Ubuntu core的特性以外,还包括以下特性:
1) 支持电容和电阻触摸屏 (型号:S700, X710, S70)
2) 支持WiFi连接
3) 支持以太网连接
4) 支持蓝牙,已预装bluez等相关软件包
5) 支持音频播放
详细可参考WiKi页面:http://wiki.friendlyelec.com/wiki/index.php/Ubuntu_Core_with_Qt-Embedded/zh
18.27 日期 2016-02-29
- Kernel:
1) 增加了基于CPU ECID生成以太网MAC地址;
2) 修复了framebuffer console刷新不及时的问题;
3) 优化内核提升了系统运行的稳定性;
4) 修复了PWM LED的一个bug,基于PWM LED增加了呼吸灯效果的trigger;
- Debian:
1) 修复了hostname异常的bug;
2) 缺省启用framebuffer console, 可在LCD/HDMI看到启动信息;
3) 集成了设置uboot环境变量的工具fw_printenv;
- Android:
ROM缺省启用了ffmpeg, 可支持更多的视频格式.
18.28 日期 2015-12-01
- 推出新的Android 5.1.1_r6,源代码已推送到 https://github.com/friendlyarm 。
- 4.2.1 简易方法制作: 新的固件已支持LCD检测,因此原来分别支持LCD和HDMI的固件已合并为一个固件。
- 4.3 在电脑上修改SD卡上的系统: 部分内容只适应于旧版本固件,标记为删除状态。
- 6 如何编译系统: 编译时源代码分支更新为 nanopi2-lollipop-mr1。
- 6.4.2 编译内核模块: 增加了如何编译支持LCD显示的启动Debian的uImage。