Difference between revisions of "Matrix - Pressure and Temperature Sensor"
(Created page with "English ==介绍== SPI_TFT * ==特性== * PCB尺寸(mm): File:xxx.png * 引脚说明: {| class="wikita...") |
(→Update Log) |
||
| (31 intermediate revisions by 3 users not shown) | |||
| Line 1: | Line 1: | ||
| − | [[Matrix - | + | [[Matrix - Pressure and Temperature Sensor/zh|查看中文]] |
| − | == | + | ==Introduction== |
| − | [[File: | + | [[File:Matrix-Pressure_and_Temperature_Sensor.png|thumb|]] |
| − | * | + | * The BMP180 is a high precision, ultra-low power small digital pressure sensor for consumer applications in mobile phones, PDAs, GPS navigation devices and outdoor equipments. With a low altitude noise of merely 0.25m at fast conversion time, the BMP180 offers superior performance. The I2C interface allows for easy system integration with a microcontroller. |
| − | + | * The BMP180 is based on piezo-resistive technology for EMC robustness, high accuracy and linearity as well as long term stability. | |
| − | * | + | * The BMP180 consists of a piezo-resistive sensor, an analog to digital converter and a control unit with E2PROM and a serial I2C interface. The E2PROM has stored 176 bit of individual calibration data. This is used to compensate offset, temperature dependence and other parameters of the sensor. |
| − | + | ||
| − | * | + | ==Features== |
| + | * I2C,3.3V | ||
| + | * Pressure data(16 to 19 bit) | ||
| + | * Temperature data(16 bit) | ||
| + | * PCB Dimension(mm): 16 x 16 | ||
| + | |||
| + | [[File:Matrix-Pressure_and_Temperature_Sensor_PCB.png|frameless|400px|]] | ||
| + | |||
| + | * Pin Description: | ||
{| class="wikitable" | {| class="wikitable" | ||
|- | |- | ||
| − | | | + | |Pin || Description |
|- | |- | ||
| − | | | + | |SDA || I2C SDA |
|- | |- | ||
| − | | | + | |SCL || I2C SCL |
| + | |- | ||
| + | |5V || Supply Voltage 5V | ||
|- | |- | ||
| − | | | + | |GND || Ground |
|} | |} | ||
| − | == | + | ==Basic Device Operation== |
| + | * The mode (ultra low power, standard, high, ultra high resolution) can be selected by the variable oversampling_setting (0, 1, 2, 3) in the C code. | ||
| + | * Calculation of true temperature and pressure in steps of 1Pa (= 0.01hPa = 0.01mbar) and temperature in steps of 0.1°C. | ||
| + | * With the measured pressure p and the pressure at sea level p0 e.g. 1013.25hPa, the altitude in meters can be calculated with the international barometric formula: [[File:Matrix-Pressure_and_Temperature_Sensor_Calculat.png|frameless|400px|]] | ||
| + | * With the measured pressure p and the absolute altitude the pressure at sea level can be calculated: | ||
| + | [[File:Matrix-Pressure_and_Temperature_Sensor_Calculat01.png|frameless|400px|]] | ||
| + | Thus, a difference in altitude of ∆altitude = 10m corresponds to 1.2hPa pressure change at sea level. | ||
| − | == | + | ==Applications== |
| − | + | ===Connect to NanoPi M1=== | |
| − | + | Refer to the following connection diagram to connect the module to the NanoPi M1:<br> | |
| − | + | [[File:Matrix-Pressure_and_Temperature_Sensor_nanopi_m1.jpg|frameless|600px|Matrix-Pressure_and_Temperature_Sensor_nanopi_m1]] | |
| − | + | ||
| − | + | ||
| − | + | Connection Details: | |
| + | {| class="wikitable" | ||
| + | |- | ||
| + | |Matrix-Pressure_and_Temperature_Sensor || NanoPi M1 | ||
| + | |- | ||
| + | |SDA || Pin3 | ||
| + | |- | ||
| + | |SCL || Pin5 | ||
| + | |- | ||
| + | |5V || Pin4 | ||
| + | |- | ||
| + | |GND || Pin6 | ||
| + | |} | ||
| + | |||
| + | ===Connect to NanoPi 2=== | ||
| + | Refer to the following connection diagram to connect the module to the NanoPi 2:<br> | ||
| + | [[File:Matrix-Pressure_and_Temperature_Sensor_nanopi_2.jpg|frameless|600px|Matrix-Pressure_and_Temperature_Sensor_nanopi_2]] | ||
| + | |||
| + | Connection Details: | ||
| + | {| class="wikitable" | ||
| + | |- | ||
| + | |Matrix-Pressure_and_Temperature_Sensor || NanoPi 2 | ||
| + | |- | ||
| + | |SDA || Pin3 | ||
| + | |- | ||
| + | |SCL || Pin5 | ||
| + | |- | ||
| + | |5V || Pin4 | ||
| + | |- | ||
| + | |GND || Pin6 | ||
| + | |} | ||
| + | |||
| + | ===Connect to NanoPi M2 / NanoPi 2 Fire=== | ||
| + | Refer to the following connection diagram to connect the module to the NanoPi M2/ NanoPi 2 Fire:<br> | ||
| + | [[File:Matrix-Pressure_and_Temperature_Sensor_nanopi_M2.jpg|frameless|600px|Matrix-Pressure_and_Temperature_Sensor_nanopi_M2]] | ||
| + | |||
| + | Connection Details: | ||
| + | {| class="wikitable" | ||
| + | |- | ||
| + | | || NanoPi M2 | ||
| + | |- | ||
| + | |SDA || Pin3 | ||
| + | |- | ||
| + | |SCL || Pin5 | ||
| + | |- | ||
| + | |5V || Pin4 | ||
| + | |- | ||
| + | |GND || Pin6 | ||
| + | |} | ||
| + | |||
| + | ===Connect to NanoPC-T2=== | ||
| + | Refer to the following connection diagram to connect the module to the NanoPC-T2:<br> | ||
| + | [[File:Matrix-Pressure_and_Temperature_Sensor_NanoPC-T2.jpg|frameless|600px|Matrix-Pressure_and_Temperature_Sensor_NanoPC-T2]] | ||
| + | |||
| + | Connection Details: | ||
| + | {| class="wikitable" | ||
| + | |- | ||
| + | |Matrix-Pressure_and_Temperature_Sensor || NanoPC-T2 | ||
| + | |- | ||
| + | |SDA || Pin6 | ||
| + | |- | ||
| + | |SCL || Pin5 | ||
| + | |- | ||
| + | |5V || Pin29 | ||
| + | |- | ||
| + | |GND || Pin30 | ||
| + | |} | ||
| + | |||
| + | ==Compile & Run Test Program== | ||
| + | Boot your ARM board with Debian and copy the matrix code: | ||
| + | <syntaxhighlight lang="bash"> | ||
| + | $ apt-get update && apt-get install git | ||
| + | $ git clone https://github.com/friendlyarm/matrix.git | ||
| + | </syntaxhighlight> | ||
| + | If your cloning is done successfully a "matrix" directory will be generated. | ||
| + | |||
| + | Compile and install Matrix: | ||
| + | <syntaxhighlight lang="bash"> | ||
| + | $ cd matrix | ||
| + | $ make && make install | ||
| + | </syntaxhighlight> | ||
| + | |||
| + | Run test program: | ||
| + | <syntaxhighlight lang="bash"> | ||
| + | $ matrix-pressure_temp | ||
| + | </syntaxhighlight> | ||
| + | Note: this module is not plug and play therefore before running the module please make sure it is connected to an ARM board.<br> | ||
| + | Here is what you should observe:<br> | ||
| + | <syntaxhighlight lang="bash"> | ||
| + | The temperature is 26.6 C | ||
| + | The pressure is 983.91 hPa | ||
| + | The altitude is 247.18 | ||
| + | </syntaxhighlight> | ||
| + | |||
| + | ==Code Sample== | ||
| + | This Matrix code sample can work with all the ARM boards mentioned in this module's wiki. The name of this code sample is "matrix-pressure_and_temperature_sensor". Here is its source code: | ||
| + | <syntaxhighlight lang="c"> | ||
| + | int main(int argc, char ** argv) | ||
| + | { | ||
| + | int ret = -1; | ||
| + | int bmpTemp=0, bmpPressure=0; | ||
| + | int board; | ||
| + | float altitude = 0; | ||
| + | |||
| + | if ((board = boardInit()) < 0) { | ||
| + | printf("Fail to init board\n"); | ||
| + | return -1; | ||
| + | } | ||
| + | |||
| + | system("modprobe "DRIVER_MODULE); | ||
| + | if ((ret = bmp180Read(BMP180_TEMP, &bmpTemp)) != -1) { | ||
| + | printf("The temperature is %.1f C\n", (float)bmpTemp / 10); | ||
| + | } else { | ||
| + | printf("Faided to get humidity\n"); | ||
| + | } | ||
| + | if ((ret = bmp180Read(BMP180_PRESSURE, &bmpPressure)) != -1) { | ||
| + | printf("The pressure is %.2f hPa\n", (float)bmpPressure / 100); | ||
| + | } else { | ||
| + | printf("Faided to get pressure\n"); | ||
| + | } | ||
| + | |||
| + | altitude = 44330 * ( 1 - pow( ((float)bmpPressure / 100 / 1013.25), (1/5.255) ) ); | ||
| + | printf("The altitude is %.2f m\n", altitude); | ||
| + | system("rmmod "DRIVER_MODULE); | ||
| + | return 0; | ||
| + | } | ||
| + | </syntaxhighlight> | ||
| + | For more details about this APIs called in this code sample refer to [[Matrix API reference manual]] <br> | ||
| + | <!--- | ||
| + | ==Download Matrix Source Code== | ||
| + | All the matrix modules' code samples are open source. They are maintained on GitHub - https://github.com/friendlyarm/matrix.git <br> | ||
| + | Each branch in this hub contains the matrix modules' code samples for a board that the matrix modules can work with.<br> | ||
| + | * The nanopi branch contains the matrix modules' code samples for the NanoPi | ||
| + | * The nanopi 2 branch contains the matrix modules' code samples for the NanoPi 2 | ||
| + | * The tiny4412 branch contains the matrix modules' code samples for the Tiny4412 | ||
| + | * The raspberrypi branch contains the matrix modules' code samples for the RaspberryPi | ||
| + | |||
| + | Please follow the steps below to get the source code:<br> | ||
| + | Install the git utility on a PC running Ubuntu14.04 | ||
<syntaxhighlight lang="bash"> | <syntaxhighlight lang="bash"> | ||
$ sudo apt-get install git | $ sudo apt-get install git | ||
</syntaxhighlight> | </syntaxhighlight> | ||
| − | + | Clone the matrix code from GitHub | |
<syntaxhighlight lang="bash"> | <syntaxhighlight lang="bash"> | ||
| − | $ git clone | + | $ git clone https://github.com/friendlyarm/matrix.git |
</syntaxhighlight> | </syntaxhighlight> | ||
| − | + | If this is successful a "matrix" directory will be generated, which will contain all the matrix modules' code samples. | |
| − | == | + | ==Connect to NanoPi 2== |
| − | === | + | ===Hardware Connection=== |
| − | + | Please refer to the following connection diagram to connect the Matrix-Pressure_and_Temperature_Sensor to the NanoPi 2:<br> | |
| − | + | [[File:Matrix-Pressure_and_Temperature_Sensor_nanopi_2.jpg|frameless|600px|Matrix-Pressure_and_Temperature_Sensor_nanopi_2]] | |
| − | + | ||
| + | Connection Details: | ||
| + | {| class="wikitable" | ||
| + | |- | ||
| + | |Matrix-Pressure_and_Temperature_Sensor_nanopi || NanoPi 2 | ||
| + | |- | ||
| + | |SDA || Pin3 | ||
| + | |- | ||
| + | |SCL || Pin5 | ||
| + | |- | ||
| + | |5V || Pin4 | ||
| + | |- | ||
| + | |GND || Pin6 | ||
| + | |} | ||
| + | |||
| + | ===Compile Test Program=== | ||
| + | Please login the matrix hub and enter the nanopi2 branch | ||
| + | <syntaxhighlight lang="bash"> | ||
| + | $ cd matrix | ||
| + | $ git checkout nanopi2 | ||
| + | </syntaxhighlight> | ||
| + | |||
| + | Compile the matrix code | ||
| + | <syntaxhighlight lang="bash"> | ||
| + | $ make CROSS_COMPILE=arm-linux- clean | ||
| + | $ make CROSS_COMPILE=arm-linux- | ||
| + | $ make CROSS_COMPILE=arm-linux- install | ||
| + | </syntaxhighlight> | ||
| + | Note: please make sure to install the cross compiler "arm-linux-gcc-4.9.3" on your PC, which is used to compile files for the NanoPi 2.<br> | ||
| + | Generated library files are under the "install/lib" directory. The test program is under the "install/usr/bin" directory.<br> | ||
| + | The modules are under the "modules" directory. The driver's source code is in github: https://github.com/friendlyarm/linux-3.4.y.git <br> | ||
| + | |||
| + | ===Run Test Program=== | ||
| + | Please insert a TF card which is flashed with Debian to a Linux host and mount its boot and rootfs sections.<br> | ||
| + | We assume the rootfs is mounted to /media/rootfs then please run the following commands to copy the module, library and test program to the card.<br> | ||
| + | <syntaxhighlight lang="bash"> | ||
| + | $ cp modules /media/rootfs/ -r | ||
| + | $ cp install/lib/* /media/rootfs/lib/ -d | ||
| + | $ cp install/usr/bin/* /media/rootfs/usr/bin/ | ||
| + | </syntaxhighlight> | ||
| + | |||
| + | Insert this TF card to your NanoPi 2, power on and run the following command to load the driver<br> | ||
| + | <syntaxhighlight lang="bash"> | ||
| + | $ cd /modules | ||
| + | $ insmod bmp085.ko | ||
| + | </syntaxhighlight> | ||
| + | |||
| + | Start the matrix-pressure_temp program<br> | ||
| + | <syntaxhighlight lang="bash"> | ||
| + | $ matrix-pressure_temp | ||
| + | </syntaxhighlight> | ||
| + | Note: this module is not plug and play therefore before running the module please make sure it is connected to a NanoPi 2.<br> | ||
| + | Here is what you expect to observe:<br> | ||
| + | [[File:matrix-pressure_temp_result.png|frameless|600px|matrix-pressure_temp_result]] | ||
| + | |||
| + | ===Code Sample=== | ||
| + | <syntaxhighlight lang="c"> | ||
| + | int main(int argc, char ** argv) | ||
| + | { | ||
| + | int ret = -1; | ||
| + | int bmpTemp = 0; | ||
| + | int bmpPressure = 0; | ||
| + | float altitude = 0; | ||
| + | |||
| + | if ((ret = bmp180Read(BMP180_TEMP, &bmpTemp)) != -1) { | ||
| + | printf("Get temperature : %.1f C\n", (float)bmpTemp / 10); | ||
| + | } else { | ||
| + | printf("Faided to get humidity\n"); | ||
| + | } | ||
| + | |||
| + | if ((ret = bmp180Read(BMP180_PRESSURE, &bmpPressure)) != -1) { | ||
| + | printf("Get pressure : %.2f hPa\n", (float)bmpPressure / 100); | ||
| + | } else { | ||
| + | printf("Faided to get pressure\n"); | ||
| + | } | ||
| + | |||
| + | altitude = 44330 * ( 1 - pow( ((float)bmpPressure / 100 / 1013.25), (1/5.255) ) ); | ||
| + | printf("Get altitude : %.2f m\n", altitude); | ||
| + | return 0; | ||
| + | } | ||
| + | </syntaxhighlight> | ||
| + | |||
| + | ==Connect to NanoPi== | ||
| + | ===Preparations=== | ||
| + | Please install a Debian on a NanoPi and an appropriate cross compiler on a PC. Please refer to wiki: [NanoPi] & [How to Build the Compiling Environment].<br> | ||
| + | Note: please use the kernel's source code from the nanopi-v4.1.y-matrix branch.<br> | ||
<syntaxhighlight lang="bash"> | <syntaxhighlight lang="bash"> | ||
$ git clone https://github.com/friendlyarm/linux-4.x.y.git | $ git clone https://github.com/friendlyarm/linux-4.x.y.git | ||
| Line 53: | Line 289: | ||
$ make | $ make | ||
</syntaxhighlight> | </syntaxhighlight> | ||
| + | After it is done a zImage will be generated under arch/arm/boot/. You can use it to replace the existing file under sd-fuse_nanopi/prebuilt. | ||
| − | === | + | ===Hardware Connection=== |
| − | + | Please refer to the following connection diagram to connect the Matrix-Pressure_and_Temperature_Sensor to the NanoPi:<br> | |
| − | [[File:Matrix- | + | [[File:Matrix-Pressure_and_Temperature_Sensor_nanopi.jpg|frameless|600px|Matrix-Pressure_and_Temperature_Sensor_nanopi]] |
| − | + | Connection Details: | |
{| class="wikitable" | {| class="wikitable" | ||
|- | |- | ||
| − | |Matrix- | + | |Matrix-Pressure_and_Temperature_Sensor_nanopi || NanoPi |
|- | |- | ||
| − | | | + | |SDA || Pin3 |
|- | |- | ||
| − | | | + | |SCL || Pin5 |
|- | |- | ||
| − | | | + | |5V || Pin4 |
| + | |- | ||
| + | |GND || Pin6 | ||
|} | |} | ||
| − | === | + | ===Compile Test Program=== |
| − | + | Please login the matrix hub and enter the nanopi branch | |
<syntaxhighlight lang="bash"> | <syntaxhighlight lang="bash"> | ||
| − | $ | + | $ cd matrix |
| − | $ | + | $ git checkout nanopi |
</syntaxhighlight> | </syntaxhighlight> | ||
| − | |||
| − | + | Compile the matrix code | |
| − | + | ||
<syntaxhighlight lang="bash"> | <syntaxhighlight lang="bash"> | ||
| − | $ | + | $ make CROSS_COMPILE=arm-linux- clean |
| − | $ | + | $ make CROSS_COMPILE=arm-linux- |
| − | $ | + | $ make CROSS_COMPILE=arm-linux- install |
</syntaxhighlight> | </syntaxhighlight> | ||
| − | + | Note: please make sure to install the cross compiler "arm-linux-gcc-4.4.3" on your PC, which is used to compile files for the NanoPi-Debian.<br> | |
| + | Generated library files are under the "install/lib" directory. Applications are under the "install/usr/bin" directory. The test program for the "Matrix-Pressure_and_Temperature_Sensor" module is "matrix-pressure_temp".<br> | ||
| − | === | + | ===Run Test Program=== |
| − | + | Please insert a TF card which is flashed with Debian to a Linux host and mount its boot and rootfs sections.<br> | |
| + | We assume the rootfs is mounted to /media/rootfs then please run the following commands to copy the module, library and test program to the card.<br> | ||
<syntaxhighlight lang="bash"> | <syntaxhighlight lang="bash"> | ||
| − | $ | + | $ cp modules /media/rootfs/ -r |
| − | $ / | + | $ cp install/lib/* /media/rootfs/lib/ -d |
| + | $ cp install/usr/bin/* /media/rootfs/usr/bin/ | ||
</syntaxhighlight> | </syntaxhighlight> | ||
| − | |||
| − | |||
| − | == | + | Insert this TF card to your NanoPi, power on and run the following command to load the driver<br> |
| + | <syntaxhighlight lang="bash"> | ||
| + | $ cd /modules | ||
| + | $ insmod bmp085-i2c.ko | ||
| + | </syntaxhighlight> | ||
| + | |||
| + | Start the matrix-pressure_temp program.<br> | ||
| + | <syntaxhighlight lang="bash"> | ||
| + | $ matrix-pressure_temp | ||
| + | </syntaxhighlight> | ||
| + | Note: this module is not plug and play therefore before running the module please make sure it is connected to a NanoPi.<br> | ||
| + | |||
| + | ===Code Sample=== | ||
| + | <syntaxhighlight lang="c"> | ||
| + | int main(int argc, char ** argv) | ||
| + | { | ||
| + | int ret = -1; | ||
| + | int bmpTemp = 0; | ||
| + | int bmpPressure = 0; | ||
| + | float altitude = 0; | ||
| + | |||
| + | if ((ret = bmp180Read(BMP180_TEMP, &bmpTemp)) != -1) { | ||
| + | printf("Get temperature : %.1f C\n", (float)bmpTemp / 10); | ||
| + | } else { | ||
| + | printf("Faided to get humidity\n"); | ||
| + | } | ||
| + | |||
| + | if ((ret = bmp180Read(BMP180_PRESSURE, &bmpPressure)) != -1) { | ||
| + | printf("Get pressure : %.2f hPa\n", (float)bmpPressure / 100); | ||
| + | } else { | ||
| + | printf("Faided to get pressure\n"); | ||
| + | } | ||
| + | |||
| + | altitude = 44330 * ( 1 - pow( ((float)bmpPressure / 100 / 1013.25), (1/5.255) ) ); | ||
| + | printf("Get altitude : %.2f m\n", altitude); | ||
| + | return 0; | ||
| + | } | ||
| + | </syntaxhighlight> | ||
| + | |||
| + | ==Connect to Tiny4412== | ||
| + | |||
| + | ==Connect to RaspberryPi== | ||
| + | |||
| + | ==Connect to Arduino== | ||
| + | ---> | ||
| + | |||
| + | ==Resources== | ||
| + | [https://ae-bst.resource.bosch.com/media/products/dokumente/bmp180/BST-BMP180-DS000-12~1.pdf BMP180.pdf] | ||
| − | == | + | ==Update Log== |
| + | ===Feb-24-2016=== | ||
| + | * Added the whole English version | ||
| − | == | + | ===Feb-26-2016=== |
| + | * Translated into English | ||
| − | == | + | ===June-23-2016=== |
| + | * Re-organized and simplified wiki | ||
Latest revision as of 14:47, 23 June 2016
Contents
1 Introduction

- The BMP180 is a high precision, ultra-low power small digital pressure sensor for consumer applications in mobile phones, PDAs, GPS navigation devices and outdoor equipments. With a low altitude noise of merely 0.25m at fast conversion time, the BMP180 offers superior performance. The I2C interface allows for easy system integration with a microcontroller.
- The BMP180 is based on piezo-resistive technology for EMC robustness, high accuracy and linearity as well as long term stability.
- The BMP180 consists of a piezo-resistive sensor, an analog to digital converter and a control unit with E2PROM and a serial I2C interface. The E2PROM has stored 176 bit of individual calibration data. This is used to compensate offset, temperature dependence and other parameters of the sensor.
2 Features
- I2C,3.3V
- Pressure data(16 to 19 bit)
- Temperature data(16 bit)
- PCB Dimension(mm): 16 x 16

- Pin Description:
| Pin | Description |
| SDA | I2C SDA |
| SCL | I2C SCL |
| 5V | Supply Voltage 5V |
| GND | Ground |
3 Basic Device Operation
- The mode (ultra low power, standard, high, ultra high resolution) can be selected by the variable oversampling_setting (0, 1, 2, 3) in the C code.
- Calculation of true temperature and pressure in steps of 1Pa (= 0.01hPa = 0.01mbar) and temperature in steps of 0.1°C.
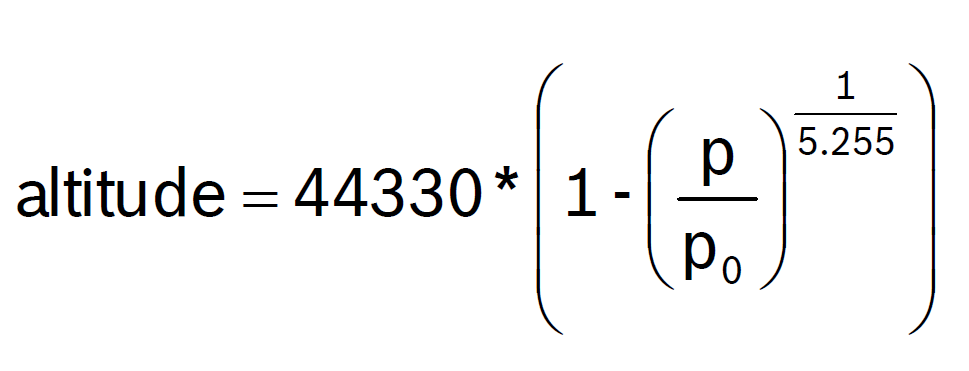
- With the measured pressure p and the pressure at sea level p0 e.g. 1013.25hPa, the altitude in meters can be calculated with the international barometric formula:
- With the measured pressure p and the absolute altitude the pressure at sea level can be calculated:

{kind=link}
 Thus, a difference in altitude of ∆altitude = 10m corresponds to 1.2hPa pressure change at sea level.
Thus, a difference in altitude of ∆altitude = 10m corresponds to 1.2hPa pressure change at sea level.
4 Applications
4.1 Connect to NanoPi M1
Refer to the following connection diagram to connect the module to the NanoPi M1:

Connection Details:
| Matrix-Pressure_and_Temperature_Sensor | NanoPi M1 |
| SDA | Pin3 |
| SCL | Pin5 |
| 5V | Pin4 |
| GND | Pin6 |
4.2 Connect to NanoPi 2
Refer to the following connection diagram to connect the module to the NanoPi 2:

Connection Details:
| Matrix-Pressure_and_Temperature_Sensor | NanoPi 2 |
| SDA | Pin3 |
| SCL | Pin5 |
| 5V | Pin4 |
| GND | Pin6 |
4.3 Connect to NanoPi M2 / NanoPi 2 Fire
Refer to the following connection diagram to connect the module to the NanoPi M2/ NanoPi 2 Fire:

Connection Details:
| NanoPi M2 | |
| SDA | Pin3 |
| SCL | Pin5 |
| 5V | Pin4 |
| GND | Pin6 |
4.4 Connect to NanoPC-T2
Refer to the following connection diagram to connect the module to the NanoPC-T2:
Matrix-Pressure_and_Temperature_Sensor_NanoPC-T2
{kind=link}
Connection Details:
| Matrix-Pressure_and_Temperature_Sensor | NanoPC-T2 |
| SDA | Pin6 |
| SCL | Pin5 |
| 5V | Pin29 |
| GND | Pin30 |
5 Compile & Run Test Program
Boot your ARM board with Debian and copy the matrix code:
$ apt-get update && apt-get install git $ git clone https://github.com/friendlyarm/matrix.git
If your cloning is done successfully a "matrix" directory will be generated.
Compile and install Matrix:
$ cd matrix $ make && make install
Run test program:
$ matrix-pressure_tempNote: this module is not plug and play therefore before running the module please make sure it is connected to an ARM board.
Here is what you should observe:
The temperature is 26.6 C The pressure is 983.91 hPa The altitude is 247.18
6 Code Sample
This Matrix code sample can work with all the ARM boards mentioned in this module's wiki. The name of this code sample is "matrix-pressure_and_temperature_sensor". Here is its source code:
int main(int argc, char ** argv) { int ret = -1; int bmpTemp=0, bmpPressure=0; int board; float altitude = 0; if ((board = boardInit()) < 0) { printf("Fail to init board\n"); return -1; } system("modprobe "DRIVER_MODULE); if ((ret = bmp180Read(BMP180_TEMP, &bmpTemp)) != -1) { printf("The temperature is %.1f C\n", (float)bmpTemp / 10); } else { printf("Faided to get humidity\n"); } if ((ret = bmp180Read(BMP180_PRESSURE, &bmpPressure)) != -1) { printf("The pressure is %.2f hPa\n", (float)bmpPressure / 100); } else { printf("Faided to get pressure\n"); } altitude = 44330 * ( 1 - pow( ((float)bmpPressure / 100 / 1013.25), (1/5.255) ) ); printf("The altitude is %.2f m\n", altitude); system("rmmod "DRIVER_MODULE); return 0; }
For more details about this APIs called in this code sample refer to Matrix API reference manual
7 Resources
8 Update Log
8.1 Feb-24-2016
- Added the whole English version
8.2 Feb-26-2016
- Translated into English
8.3 June-23-2016
- Re-organized and simplified wiki