Difference between revisions of "NanoPi 2 Fire"
(→Source Code and Image Files Download Links) |
(→TF Card We Tested) |
||
| Line 177: | Line 177: | ||
===TF Card We Tested=== | ===TF Card We Tested=== | ||
| − | To make your NanoPi 2 Fire boot and run fast we highly | + | To make your NanoPi 2 Fire boot and run fast we highly recommend you use a Class10 8GB SDHC TF card or a better one. The following cards are what we used in all our test cases presented here: |
*SanDisk TF 8G Class10 Micro/SD TF card: | *SanDisk TF 8G Class10 Micro/SD TF card: | ||
[[File:SanDisk MicroSD.png|frameless|100px|SanDisk MicroSD 8G]] | [[File:SanDisk MicroSD.png|frameless|100px|SanDisk MicroSD 8G]] | ||
Revision as of 02:05, 25 October 2016
Contents
- 1 Introduction
- 2 Features
- 3 Diagram, Layout and Dimension
- 4 Get Started
- 5 Play with Debian
- 6 Make Your Own OS Image
- 7 Connect NanoPi 2 Fire to External Modules
- 7.1 Connect NanoPi 2 Fire to USB Camera(FA-CAM202)
- 7.2 Connect NanoPi 2 Fire to CMOS 5M-Pixel Camera
- 7.3 Use OpenCV to Access USB Camera
- 7.4 Connect NanoPi 2 Fire to USB WiFi
- 7.5 Connect NanoPi 2 Fire to Matrix GPS Module
- 7.6 Connect NanoPi 2 Fire to I2C Device
- 7.7 Connect NanoPi 2 Fire to SPI Device
- 8 More OS Support
- 9 FAQ
- 10 Source Code and Image Files Download Links
- 11 Resources
- 12 External Links
- 13 Update Log
1 Introduction



- The NanoPi 2 Fire is a high performance ARM Board developed by FriendlyARM for Hobbyists, Makers and Hackers for IOT projects. It features Samsung's Cortex-A9 Quad Core S5P4418@1.4GHz SoC and 1G 32bit DDR3 RAM. It has a Gbps Ethernet port. It boots Android and Debian from a TF card. It integrates an HDMI and LCD interface. Its adoption of the Raspberry Pi's GPIO pin header makes it compatible with both Raspberry Pi's external GPIO modules and Arduino's shield boards. Its PCB dimension is 75 x 40 mm.
2 Features
- CPU: S5P4418, 1.4GHz
- RAM: 1GB DDR3
- Connectivity: Gbps Ethernet port
- PMU Power Management: AXP228, support software power-off, sleep and wakeup functions
- USB 2.0 Type A x 1
- Debug Serial Port/UART0 x 1
- microSD Slot x 1
- microUSB x 1: for data transmission and power input
- LCD Interface: 0.5 mm pitch SMT FPC seat, for full-color LCD (RGB: 8-8-8)
- HDMI: HDMI 1.4A, Type-A, 1080P60
- DVP Camera Interface: 0.5mm spacing FPC socket. It includes ITU-R BT 601/656 8-bit, I2C and IO
- GPIO: 2.54mm spacing 40pin, compatible with Raspberry Pi's GPIO. It includes UART, SPI, I2C, PWM, IO etc
- Button: Power Button x 1, Reset Button x 1
- LED: LED for Power Indication x 1, System LED x 1
- PCB Dimension: 75 x 40mm
- Power: DC 5V/2A
- OS: Android, Debian

3 Diagram, Layout and Dimension
3.1 Layout

- GPIO Pin Spec
Pin# Name Pin# Name 1 SYS_3.3V 2 VDD_5V 3 I2C0_SDA 4 VDD_5V 5 I2C0_SCL 6 DGND 7 GPIOD8/PPM 8 UART3_TXD/GPIOD21 9 DGND 10 UART3_RXD/GPIOD17 11 UART4_TX/GPIOB29 12 GPIOD1/PWM0 13 GPIOB30 14 DGND 15 GPIOB31 16 GPIOC14/PWM2 17 SYS_3.3V 18 GPIOB27 19 SPI0_MOSI/GPIOC31 20 DGND 21 SPI0_MISO/GPIOD0 22 UART4_RX/GPIOB28 23 SPI0_CLK/GPIOC29 24 SPI0_CS/GPIOC30 25 DGND 26 GPIOB26 27 I2C1_SDA 28 I2C1_SCL 29 GPIOC8 30 DGND 31 GPIOC7 32 GPIOC28 33 GPIOC13/PWM1 34 DGND 35 SPI2_MISO/GPIOC11 36 SPI2_CS/GPIOC10 37 AliveGPIO3 38 SPI2_MOSI/GPIOC12 39 DGND 40 SPI2_CLK/GPIOC9
- Debug Port(UART0)
Pin# Name 1 DGND 2 VDD_5V 3 UART_TXD0 4 UART_RXD0
- DVP Camera Interface Pin Spec
Pin# Name 1, 2 SYS_3.3V 7,9,13,15,24 DGND 3 I2C0_SCL 4 I2C0_SDA 5 GPIOB14 6 GPIOB16 8,10 NC 11 VSYNC 12 HREF 14 PCLK 16-23 Data bit7-0
- RGB LCD Interface Pin Spec
Pin# Name Description 1, 2 VDD_5V 5V output, LCD power 11,20,29, 37,38,39,40, 45 DGND ground 3-10 Blue LSB to MSB RGB Blue 12-19 Green LSB to MSB RGB Green 21-28 Red LSB to MSB RGB Red 30 GPIOB25 available for users 31 GPIOC15 occupied by FriendlyARM one wire technology to recognize LCD models and control backlight and implement resistive touch, not applicable for users 32 XnRSTOUT Form CPU low when system is reset 33 VDEN signal the external LCD that data is valid on the data bus 34 VSYNC vertical synchronization 35 HSYNC horizontal synchronization 36 LCDCLK LCD clock, Pixel frequency 41 I2C2_SCL I2C2 clock signal, for capacitive touch's data transmission 42 I2C2_SDA I2C2 data signal, for capacitive touch's data transmission 43 GPIOC16 interrupt pin for capacitive touch, used with I2C2 44 NC not connected
- Note
- SYS_3.3V: 3.3V power output
- VDD_5V: 5V power input/output. When the external device’s power is greater than the MicroUSB’s the external device is charging the board otherwise the board powers the external device. The input range is 4.7V ~ 5.6V
- For more details please refer to the document:NanoPi2_Fire_1512B_Schematic.pdf
3.2 Board Dimension

- For more details please refer to the document:NanoPi2_Fire_1512B_Dimensions(dxf).zip
4 Get Started
4.1 Essentials You Need
Before play with your NanoPi 2 Fire please get the following items ready
- NanoPi 2 Fire
- microSD Card/TFCard: Class 10 or Above, minimum 8GB SDHC
- microUSB power. A 5V/2A power is a must
- HDMI monitor or LCD
- USB keyboard and mouse
- A Host running Ubuntu 14.04 64 bit system
4.2 TF Card We Tested
To make your NanoPi 2 Fire boot and run fast we highly recommend you use a Class10 8GB SDHC TF card or a better one. The following cards are what we used in all our test cases presented here:
- SanDisk TF 8G Class10 Micro/SD TF card:

- SanDisk TF128G MicroSDXC TF 128G Class10 48MB/S:

- 川宇 8G C10 High Speed class10 micro SD card:

4.3 Make an Installation MicroSD Card
4.3.1 Under Windows
Please get the following files from here:download link to download image files:
For LCD or HDMI output please use the following files: nanopi2-debian-sd4g.img.zip Debian image files nanopi2-android-sd4g.img.zip Android image files Flash Utility: win32diskimager.rar Windows utility. Under Linux users can use "dd"
- Please uncompress these files. Insert an SD card(at least 4G) to a Windows PC, run the win32diskimager utility as administrator,On the utility's main window select your SD card's drive and the image files and click on "write" to start flashing the SD card.
- Please insert this card to your NanoPi 2 Fire and power on (with a 5V/2A power source). If the green LED is on and the blue LED is blinking this indicates your NanoPi 2 Fire is successfully booted.
4.3.2 Under Linux Desktop
- 1) Insert your microSD card to your host running Ubuntu and check your SD card's device name
dmesg | tail
Search the messages output by "dmesg" for similar words like "sdc: sdc1 sdc2". If you can find them it means your SD card is recognized as "/dev/sdc". Or you can check that by commanding "cat /proc/partitions".
- 2) Download Firmware Package
git clone https://github.com/friendlyarm/sd-fuse_nanopi2.git cd sd-fuse_nanopi2
- 3) Flash Android Firmware to MicroSD Card
su ./fusing.sh /dev/sdx
(Note: you need to replace "/dev/sdx" with the device name in your system) When you do “git clone” you have to hit “Y” within 10 seconds after it prompts you to download image files otherwise you will miss the download.
- 4) Flash Debian Firmware to MicroSD Card
./fusing.sh /dev/sdx debian
4.3.3 Extend NanoPi 2 Fire's TF Card Section
- When Debian/Ubuntu is loaded the TF card's section will be automatically extended.
- When Android is loaded you need to run the following commands on your host PC to extend your TF card's section:
sudo umount /dev/sdx? sudo parted /dev/sdx unit % resizepart 4 100 resizepart 7 100 unit MB print sudo resize2fs -f /dev/sdx7
(Note: you need to replace "/dev/sdx" with the device name in your system)
4.3.4 LCD/HDMI Resolution
When system boots our uboot will check whether it is connected to an LCD. If it recognizes an LCD it will configure its resolution. By default our uboot configures the display to HDMI 720P.
If you want to reset the LCD resolution you can modify file "arch/arm/plat-s5p4418/nanopi2/lcds.c" in the kernel and recompile it.
If your NanoPi 2 connects an HDMI monitor and it runs Android it will automatically set the resolution to an appropriate HDMI mode by checking "EDID". If your NanoPi 2 connects an HDMI monitor and it runs Debian by default it will set the resolution to HDMI 720P and in this case you can set it to 1080P by modifying your kernel's configuration.
4.4 Update Image Files in MicroSD Card From PC Host
If you want to make some changes to the image files in your MicroSD card please follow steps below otherwise you can skip this section.
Please insert your MicroSD card to a PC host running LINUX, mount the boot and rootfs sections of the SD card and follow the steps below:
1) If you want to change your kernel command line parameters you can do it via the fw_setevn utility under "sd-fuse_nanopi2/tools"
Check the current Command Line:
cd sd-fuse_nanopi2/tools ./fw_printenv /dev/sdc | grep bootargs
Android 5.1.1_r6 starts SELinux. By default it is enforcing. You can change it this way:
./fw_setenv /dev/sdc bootargs XXX androidboot.selinux=permissive
This will set it to "permissive". The "XXX" stands for the original bootargs' value.
2) Update Kernel
Our customized uboot will check the LCD type when it boots.For a non-Android OS If it recognizes an LCD connected to the NanoPi 2 Fire it will load "uImage" from "boot" otherwise it will load "uImage.hdmi"
However for Android these two files don't make any differences for whatever display device it detects. You can use your generated uImage to replace the existing one under "boot".
For Debian if your generated kernel is for LCD you need to replace the existing uImage or if your kernel is for HDMI you need to replace the existing uImage.hdmi .
4.5 Run Android or Debian
- Insert a MicroSD card with Android image files to your NanoPi 2 Fire, connect the NanoPi 2 Fire to an HDMI monitor and a 5V/2A power source the NanoPi 2 Fire will be automatically powered on. If you can see the blue LED flashing it means your board is working and you will see Android loading on the HDMI monitor.
1) If you connect the NanoPi 2 Fire to an HDMI monitor you need to use a USB mouse and a USB keyboard to operate. If you connect it to an LCD with capacitive touch you can operate directly on the LCD. 2)If you want to do kernel development you'd better have a serial board which allows you to operate the board via a serial terminal.
- Here is a case in which we connect a NanoPi 2 Fire to a PC running Ubuntu and Minicom via a serial cable you will see system messages output to the PC’s minicom terminal:
- Under Debian the password for "root" is "fa".

4.6 Login Debian via VNC or SSH
If your NanoPi 2 Fire is not connected to a display device you can download and install a "VNC Viewer" on your PC or mobile phone and login the NanoPi 2 Fire via VNC. Its default password is "fa123456". Here is a screenshot which shows how it looks like when users login the NanoPi 2 Fire from an iPhone via VNC:

You can login via "SSH -l root 192.168.8.1" too and the default password for "root" is "fa".
5 Play with Debian
5.1 Ethernet Connection
If the NanoPi 2 Fire is connected to a network via Ethernet before it is powered on it will automatically obtain an IP after it is powered on. If it is not connected via Ethernet or its DHCP is not activated obtaining an IP will fail and system will hang on for about 15 to 60 seconds.
- 1) Setup MAC Address
The NanoPi 2 Fire by default doesn't have a valid MAC address. If the board connects a network successfully it will automatically generates a random MAC in "/etc/network/interfaces.d/eth0". Users can change it to a self-defined valid one:
vi /etc/network/interfaces.d/eth0
Here is the content of a sample configuration file:
auto eth0 allow-hotplug eth0 iface eth0 inet dhcp hwaddress 76:92:d4:85:f3:0f
The "hwaddress" specifies the MAC address. Here the "76:92:d4:85:f3:0f" is a random MAC. We suggest users change it to a valid one
Note: when you reset the MAC please make sure your MAC meets IEEE's definition otherwise it will cause unexpected issues.
After you make your change, save, exit and reboot your board or run the following commands to restart the network:
systemctl restart networking
5.2 Install Debian Packages
We provide a Debian jessie image. You can install Jessie's packages by commanding "apt-get". If this is your first installation you need to update the package list by running the following command:
apt-get updateYou can install your preferred packages. For example if you want to install an FTP server you can do this:
apt-get install vsftpdNote: you can change your download server by editting "/etc/apt/sources.list". You can get a complete server list from [1]. You need to select the one with "armhf".
6 Make Your Own OS Image
6.1 Setup Development Environment
6.2 Install Cross Compiler
Please download the compiler package:
git clone https://github.com/friendlyarm/prebuilts.git sudo mkdir -p /opt/FriendlyARM/toolchain sudo tar xf prebuilts/gcc-x64/arm-cortexa9-linux-gnueabihf-4.9.3.tar.xz -C /opt/FriendlyARM/toolchain/
Then add the compiler's directory to "PATH" by appending the following lines in "~/.bashrc":
export PATH=/opt/FriendlyARM/toolchain/4.9.3/bin:$PATH export GCC_COLORS=auto
Execute "~/.bashrc" to make the changes into effect. Please note that there is a space after ".":
. ~/.bashrcThis compiler is a 64-bit one therefore it cannot be run on a 32-bit LINUX. After the compiler is installed you can verify it by running the following commands:
arm-linux-gcc -v Using built-in specs. COLLECT_GCC=arm-linux-gcc COLLECT_LTO_WRAPPER=/opt/FriendlyARM/toolchain/4.9.3/libexec/gcc/arm-cortexa9-linux-gnueabihf/4.9.3/lto-wrapper Target: arm-cortexa9-linux-gnueabihf Configured with: /work/toolchain/build/src/gcc-4.9.3/configure --build=x86_64-build_pc-linux-gnu --host=x86_64-build_pc-linux-gnu --target=arm-cortexa9-linux-gnueabihf --prefix=/opt/FriendlyARM/toolchain/4.9.3 --with-sysroot=/opt/FriendlyARM/toolchain/4.9.3/arm-cortexa9-linux-gnueabihf/sys-root --enable-languages=c,c++ --with-arch=armv7-a --with-tune=cortex-a9 --with-fpu=vfpv3 --with-float=hard ... Thread model: posix gcc version 4.9.3 (ctng-1.21.0-229g-FA)
6.3 Compile U-Boot
Download the U-Boot source code and compile it. Please note the github's branch is nanopi2-lollipop-mr1:
git clone https://github.com/friendlyarm/uboot_nanopi2.git cd uboot_nanopi2 git checkout nanopi2-lollipop-mr1 make s5p4418_nanopi2_config make CROSS_COMPILE=arm-linux-
After your compilation succeeds a u-boot.bin will be generated. If you want to test it please flash it to your installation MicroSD card via fastboot. Here is how you can do it:
1) On your PC host please run "sudo apt-get install android-tools-fastboot" to install the fastboot utility
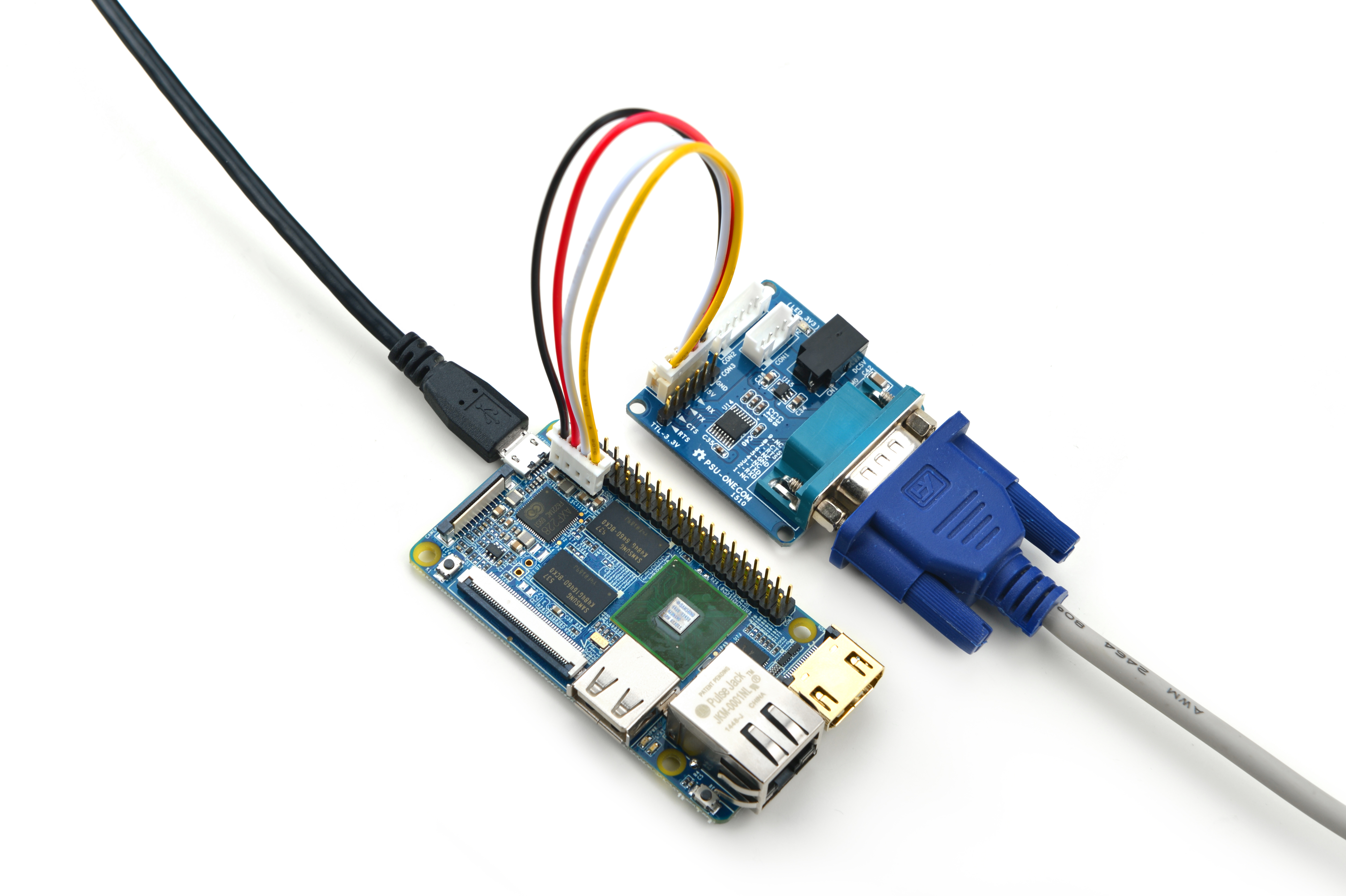
2) Connect your NanoPi 2 Fire to your PC host via a serial cable (e.g. PSU-ONECOME). Press the enter key within two seconds right after you power on your NanoPi 2 Fire and you will enter uboot's command line mode:
3) After type "fastboot" and press "enter" you will enter the fastboot mode:
4) Connect your NanoPi 2 Fire to this PC host via a microUSB cable and type the following command to flash the u-boot.bin:
fastboot flash bootloader u-boot.bin
Warning: you cannot update this MicroSD card by commanding "dd". This command which will cause trouble when booting the NanoPi 2 Fire.
6.4 Prepare mkimage
You need the mkimage utility to compile a U-Boot source code package. Please make sure this utility works well on your host before you start compiling a uImage.
You can install this utility by either commanding "sudo apt-get install u-boot-tools" or following the commands below:
cd uboot_nanopi2 make CROSS_COMPILE=arm-linux- tools sudo mkdir -p /usr/local/sbin && sudo cp -v tools/mkimage /usr/local/sbin
6.5 Compile Linux kernel
6.5.1 Compile Kernel
- Download Kernel Source Code
git clone https://github.com/friendlyarm/linux-3.4.y.git cd linux-3.4.y git checkout nanopi2-lollipop-mr1
The NanoPi 2 Fire's kernel source code lies in the "nanopi2-lollipop-mr1" branch.
- Compile Android Kernel
make nanopi2_android_defconfig touch .scmversion make uImage
- Compile Debian Kernel
make nanopi2_linux_defconfig touch .scmversion make uImage
After your compilation succeeds a uImage will be generated in the "arch/arm/boot/uImage" directory. This kernel is for HDMI. You can use it to replace the existing uImage.hdmi
If you want to generate a kernel for LCD you can do it this way:
touch .scmversion make nanopi2_linux_defconfig make menuconfig Device Drivers --> Graphics support --> Nexell Graphics --> [*] LCD [ ] HDMI make uImage
After your compilation succeeds a uImage will be generated for LCD. You can use it to replace the existing uImage.
6.5.2 Compile Kernel Modules
Android contains kernel modules which are in the "/lib/modules" directory in the system section. If you want to add your own modules to the kernel or you changed your kernel configurations you need to recompile these new modules.
Compile Original Kernel Modules:
cd linux-3.4.y make CROSS_COMPILE=arm-eabi- modules
Here we have two new modules and we can compile them by following the commands below:
cd /opt/FriendlyARM/s5p4418/android ./vendor/friendly-arm/build/common/build-modules.sh
The "/opt/FriendlyARM/s5p4418/android" directory points to the top directory of Android source code. You can get more details by specifying option "-h".
After your compilation succeeds new modules will be generated
6.6 Compile Android
- Install Cross Compiler
We recommend installing 64 bit Ubuntu 14.04 on your PC host.
sudo apt-get install bison g++-multilib git gperf libxml2-utils make python-networkx zip sudo apt-get install flex libncurses5-dev zlib1g-dev gawk minicom
For more details please refer to https://source.android.com/source/initializing.html 。
- Download Source Code
You need to use repo to get the Android source code. Please refer to https://source.android.com/source/downloading.html 。
mkdir android && cd android repo init -u https://github.com/friendlyarm/android_manifest.git -b nanopi2-lollipop-mr1 repo sync
The "android" directory is the working directory.
- Compile System Package
source build/envsetup.sh lunch aosp_nanopi2-userdebug make -j8
After your compilation succeeds the following files will be generated in the "out/target/product/nanopi2/" directory.
filename partition Description boot.img boot - cache.img cache - userdata.img userdata - system.img system - partmap.txt - partition description file
- Flash Image to TF Card
If you want to boot your board from a TF card you can copy your generated image files to your card's sd-fuse_nanopi2/android/ direcroty and flash the image to the card with our script. For more details refer to #Under Linux Desktop.
7 Connect NanoPi 2 Fire to External Modules
7.1 Connect NanoPi 2 Fire to USB Camera(FA-CAM202)
- In this usecase the NanoPi 2 Fire runs Debian. If you connect your NanoPi 2 Fire to our LCD after Debain is fully loaded please click on "other"-->"xawtv" on the left bottom of the GUI and the USB Camera application will be started. After enter "welcome to xawtv!" please click on "OK" to start exploring.


7.2 Connect NanoPi 2 Fire to CMOS 5M-Pixel Camera
- In this usecase the NanoPi 2 Fire runs Android5.1. If you connect your NanoPi 2 Fire to our LCD after Debain is fully loaded please click on the "Camera" icon the application will be started.

7.3 Use OpenCV to Access USB Camera
- The full name of "OpenCV" is Open Source Computer Vision Library and it is a cross platform vision library.
- When the NanoPi 2 Fire runs Debian users can use OpenCV APIs to access a USB Camera device.
1. Here is a guideline on how to use OpenCV with C++ on the NanoPi 2 Fire:
- Firstly you need to make sure your NanoPi 2 Fire is connected to the internet.Login to your NanoPi 2 Fire via a serial terminal or SSH. After login type in your username(root) and password(fa):
- Run the following commands:
apt-get update apt-get install libcv-dev libopencv-dev
2. Make sure your USB camera works with the NanoPi 2 Fire. You can test your camera with NanoPi 2 Fire's camera utility.
3. Check your camera device:
ls /dev/video*
- Note:in our case "video0" was the camera's device name.
4. OpenCV's code sample(Official Code Sample in C++) under /home/fa/Documents/opencv-demo. You can compile it by running the following command:
cd /home/fa/Documents/opencv-demo make
If it is compiled successfully a demo executable will be generated
5. Connect NanoPi 2 Fire to a USB Keyboard & Run the Following Command:
./demo
7.4 Connect NanoPi 2 Fire to USB WiFi
- Click on here to enter the kernel compilation [2]
7.5 Connect NanoPi 2 Fire to Matrix GPS Module
- The Matrix-GPS module is a small GPS module with high performance. It can be used in navigation devices, four-axle drones and etc.
- The Matrix-GPS module uses serial communication. When the NanoPi 2 Fire is connected to the Matrix GPS module, after the NanoPi 2 Fire is powered up type in the following command in a terminal or click on the xgps icon it will be started.
$su - fa -c "DISPLAY=:0 xgps 127.0.0.1:9999"
- Or on the Debian GUI start the LXTerminal, type in "xgps" and enter it will be started too.
For more details about this GPS module refer to this link
Refer to the following diagram to connect the NanoPi 2 Fire to the Matrix-GPS:

Connection Details:
| Matrix-GPS | NanoPi 2 Fire |
| RXD | Pin8 |
| TXD | Pin10 |
| 5V | Pin4 |
| GND | Pin6 |
7.6 Connect NanoPi 2 Fire to I2C Device
- The Matrix-I2C_LCD1602_Keypad module is an easy-to-use display module based on the LCD1602. This module integrates the LCD1602 and the MCP23017 module. It has five programmable keys which allow users to control the LCD1602's display and external devices connected to the module.
- The MCP23017 communicates through I2C interface. You can learn how the NanoPi 2 Fire communicates to an I2C device by studying this module.
For more details about the Matrix - I2C LCD1602 Keypad refer to this link
Refer to the following diagram to connect the NanoPi 2 Fire to the Matrix-I2C_LCD1602_Keypad:

Connection Details:
| Matrix-I2C_LCD1602_Keypad | NanoPi 2 Fire |
| SDA | Pin3 |
| SCL | Pin5 |
| 5V | Pin4 |
| GND | Pin6 |
7.7 Connect NanoPi 2 Fire to SPI Device
- The Matrix-2'8_SPI_Key_TFT module is a 2.8" TFT LCD module. It uses the ST7789S IC and the XPT2046 resistive IC. The LCD's resolution is 320 * 240 and communicates via SPI. It has three programmable user keys.
For more details about the Matrix-2'8_SPI_Key_TFT SPI module refer to this link
Refer to the following diagram to connect the NanoPi 2 Fire to the Matrix-2'8_SPI_Key_TFT module:

Connection Details
| Matrix-2'8_SPI_Key_TFT | NanoPi 2 Fire |
| GND | Pin6 |
| 5V | Pin2 |
| LED_EN | Pin11 |
| LCD_RESET | Pin7 |
| LCD_D/C | Pin22 |
| LCD_CS | Pin24 |
| SPICLK | Pin23 |
| SPIMOSI | Pin19 |
| SPIMISO | Pin21 |
| T_CS | Pin26 |
| T_IRQ | Pin18 |
8 More OS Support
8.1 Ubuntu-Core with Qt-Embedded
Ubuntu Core with Qt-Embedded is a light Linux system without X-windows. It uses the Qt-Embedded's GUI and is popular in industrial and enterprise applications. Besides the regular Ubuntu core's features our Ubuntu-Core has the following additional features:
- it supports our LCDs with both capacitive touch and resistive touch(S700, X710, S70)
- it supports WiFi
- it supports Ethernet
- it supports Bluetooth and has been installed with bluez utilities
- it supports audio playing
For more details refer to Ubuntu Core with Qt-Embedded.
8.2 Ubuntu-Mate
- Please go to this link [3] to download the image files
- Please uncompress it and flash the image file to a TF card with win32diskimager under Windows
- After it is done you can boot your NanoPi 2 Fire with this card
- Login name: "root" or "fa", Password: fa
Note: this UbuntuMate works with both NanoPi 2 and NanoPi 2 Fire
8.3 Kali
- Please go to this link [4] to download the image files
- Please prepare an 8G High Speed MicroSD card, insert it to a Linux host and do "sudo fdisk -l" to check its device name, i.e. "/dev/sd*"
- Please copy the image files to the card by running the following commands as root:
xzcat kali-2.0-nanopi2.img.xz | dd of=<YOURDEVICE> bs=1m
- After it is done you can boot your NanoPi 2 Fire with this card.
Note: this is offered by Kali and FriendlyARM doesn't provide technical support for it.
8.4 Android-Remixos
Go to this link [5] to download the image files;
- Untar the image ball:
tar -xf nanopi2-android-remixos-sd4g.tar
- Use the win32diskimager utility to flash the image to a MicroSD card.
It supports HDMI and LCD output and works with all existing FriendlyARM 4418 based boards.
Note: this is offered by Remix team and FriendlyARM doesn't provide technical support for it.
9 FAQ
- Common Issues
Where to download image files? The NanoPi 2 Fire has a wiki site which has all the necessary information and details about everything. Its link is :http://wiki.friendlyarm.com/wiki/index.php/NanoPi_2_Fire After the board is powered on the blue LED is not on 1. The power is not enough or instable. A 5V/2A power is a must;
2. The TF card is not a high speed one. Please use an 8G (or above) microSD Card/TFCard, Class 10 (or Above);
3. Please try our latest image files;
4. Please contact our techsupport at techsupport@friendlyarm.comAfter the board is powered on the blue LED is on but not blinking 1. The power is not enough or instable. A 5V/2A power is a must;
2. The TF card is not a high speed one. Please use an 8G (or above) microSD Card/TFCard, Class 10 (or Above);
3. Please try our latest image filesWhen the board doesn’t connect any display device it can boot normally and output system messages to the serial port. However when it connects an LCD the LCD doesn’t display anything or reboots frequently before it fully loads an OS. 1. The power is not enough or instable. A 5V/2A power is a must;
2. Please check whetherthe FPC cable is properly connected or whether it is broken or not;
3. Please connect the board to a PC via a serial cable and check whether the LCD is recognized by the board.When the board doesn’t connect an LCD it can boot normally and output system messages to the serial port. However when it connects an HDMI monitor the monitor doesn’t display anything 1. You can try connecting your board to a monitor with DVI interface with an HDMI to DVI cable
2. Please use a monitor which has an HDMI interface
When the board runs Debian HDMI doesn’t have audio output Our Debian system currently doesn’t support HDMI audio because we didn’t include HDMI’s audio package When the board runs Android HDMI doesn’t support volume control. Our Android system currently doesn’t support HDMI’s volume control. Users can adjust it via a remote control
10 Source Code and Image Files Download Links
11 Resources
- 《创客秘籍》Hacker's Book in Chinese by FriendlyARM
- 《创客秘籍-02》Hacker's Book-02 in Chinese by FriendlyARM
- 《创客秘籍-03》Hacker's Book-03 in Chinese by FriendlyARM
- Schematic (NanoPi2_Fire_1512B_Schematic.pdf)
- Dimensions (NanoPi2_Fire_1512B_Dimensions(dxf).zip)
- S5P4418 Datasheet (S5P4418_Datasheet_0.1.pdf)
- Matrix Modules & Wiki Sites:
- Button
- LED
- A/D Converter
- Relay
- 3-Axis Digital Accelerometer
- 3-Axis Digital Compass
- Temperature Sensor
- Temperature & Humidity Sensor
- Buzzer
- Joystick
- I2C(PCF8574)+LCD1602
- Sound Sensor
- Ultrasonic Ranger
- GPS
- Matrix - Compact Kit
- Fire Sensor
- CAM500A Camera
- BAll Rolling Switch
- 2'8 SPI Key TFT 2.8" SPI LCD
- IR Counter
- IR Receiver
- L298N Motor Driver
- MQ-2 Gas Sensor
- MQ-3 Gas Sensor
- One_Touch_Sensor
- _Photoresistor
- _Potentiometer
- Pressure & Temperature Sensor
- RGB LED
- RTC
- Rotary Encoder
- Soil Moisture Sensor
- Thermistor
- USB WiFi
- Water Sensor
12 External Links
13 Update Log
13.1 Jan-29-2016
- Add 9 More OS Support
13.2 Feb-02-2016
- Add 9.1 Ubuntu-Mate
- Add 9.2 Ubuntu-Core
- Add 11 External Links
13.3 Mar-03-2016
- Modified Section 4.5
13.4 Mar-09-2016
- Corrected a typo
13.5 Mar-17-2016
- Updated Ubuntu-Mate, Kali and Deepin15's download links
13.6 Mar-18-2016
- Modified section 4.3.1
- Added Sections 10 and 11
13.7 April-08-2016
- Added sections 7.5, 7.6 and 7.7
- Updated sections 8.1 and 11
13.8 July-05-2016
- Rewrote sections 4.3.3, 6.6 and 7.3